Pada saluran transmisi tegangan tinggi, ada beberapa masalah yang mungkin terjadi yaitu adanya kotoran atau debu pada saluran, maupun benda yang tersangkut pada saluran tersebut. Masalah ini dapat mengakibatkan gangguan listrik pada saluran transmisi berdampak negative terhadap kesehatan, transportasi, maupun keselamatan yang berada di daerah transmisi tegangan listrik. Adanya pemeliharaan saluran transmisi tegangan tinggi sangat penting bagi keselamatan manusia maupun keamanan bagi listrik tegangan tinggi. Pemeliharaan preventif adalah cara yang dilakukan untuk menghindari atau mengurangi kemungkinan adanya masalah yang terjadi pada saluran transmisi. Cara yang dilakukan untuk pemeliharaan preventif yaitu dengan expliner robot.
Expliner robot adalah robot yang digunakan untuk menghindari adanya saluran yang terdapat masalah dengan memberikan rincian garis mengenai goresan, kesalahan kecil, atau korosi yang harus diperbaiki sebelum saluran terjadi kerusakan. Expliner robot juga dapat digunakan untuk membersihkan debu atau kotoran pada saluran yang dapat mengganggu kabel saluran transmisi.
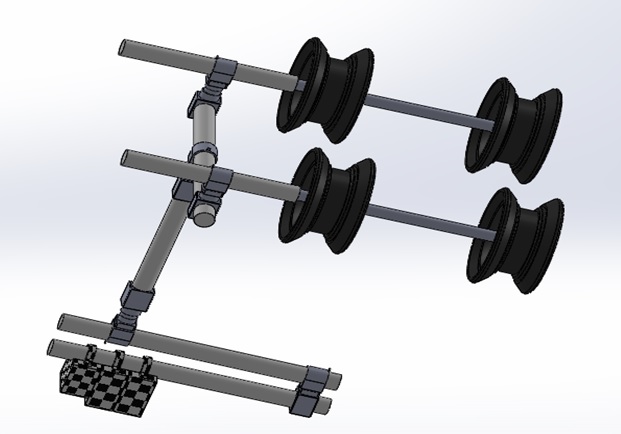
Expliner robot memiliki 3 bagian penting yang harus ada pada robot yaitu:
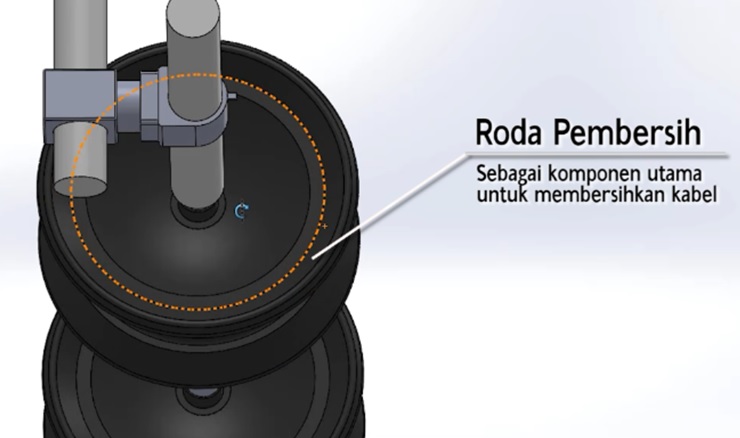
- Roda : komponen yang berbentuk bulat ini berfungsi sebagai penggerak expliner robot diatas bentangan kawat penghantar bertegangan pada saluran transmisi. Roda yang digunakan berjumlah empat buah dengan dua roda pada masing-masing sisinya. Dilapisi dengan bahan khusus sehingga dapat difungsikan sebagai pembersih debu atau kotoran pada kawat ketika melewatinya.
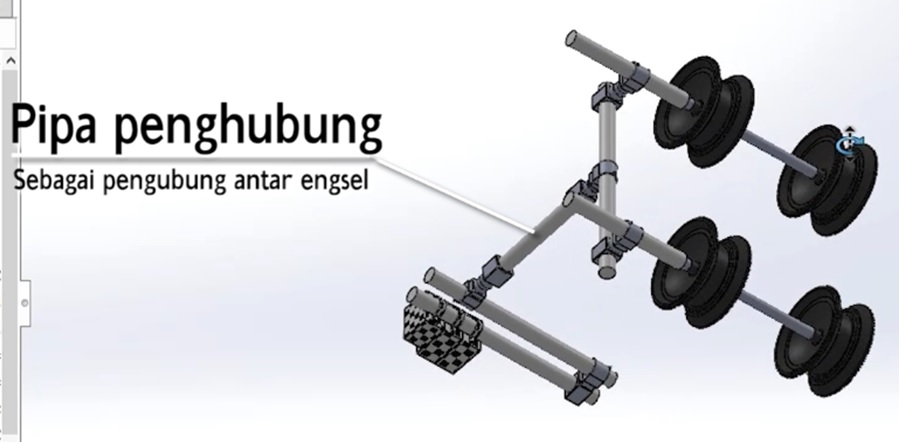
- Pipa besi : berbentuk seperti paralon fungsinya sebagai penopang roda, sumber daya (baterai) dan komponen pendukung lainnya atau dengan kata lain adalah rangka dari expliner robot itu sendiri. Berbahan besi ringan yang kuat sehingga tidak terlalu membebani kawat penghantar ketika dioperasikan.
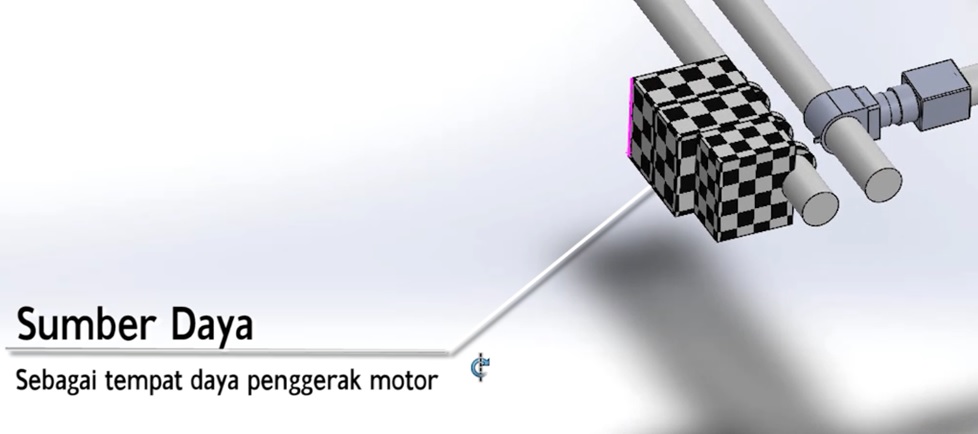
- Baterai : baterai digunakan untuk mensuplai energi pada expliner robot agar dapat dioperasikan. Peletakkan baterai ini pada bagian bawah robot dimaksudkan menjaga keseimbangan ketika berjalan dan sebagai pemberat ketika akan melewati suatu penghalang.
Expliner robot dapat beroperasi di antara menara transmisi dengan beberapa bentang kabel tergantung pada konfigurasi saluran transmisi yang akan dilakukan pembersihan kabelnya. Expliner robot mampu mengontrol kecepatan gerakannya sesuai dengan panjang bentang kabel transmisi dan pada saat membersihkan kabel yang terdapat debu atau kotoran membutuhkan waktu untuk membersihkan kabel transmisi tersebut.
Untuk desain bentuk dari expliner robot sendiri yaitu menggunakan software SolidWorks. Saat pembuatan desain robot, hal terpenting yang digunakan saat mendesain yaitu ukuran tiap bagian yang harus disesuaikan agar saat bagian tersebut dihubungkan menjadi satu tidak terdapat kesulitan atau terdapat perbedaan ukuran. Untuk menghubungkan antar bagian expliner robot yaitu dengan cara assembly tiap bagiannya. Setelah bagian expliner robot sudah menjadi satu, robot di convert dari software SolidWorks ke-3D Builder.
Untuk menggerakkan expliner robot yaitu dengan menggunakan software Processing IDE. Setelah expliner robot selesao di convert menjadi bentuk 3D Builder (Obj file), buat script pada software Processing IDE untuk menggerakkan roda-roda pembersih tersebut pada kabel dan membersihkan debu atau kotoran yang terdapat pada kabel.
Disusun oleh:
- Candra Setiawan (17/411104/SV/13031)
- Dheyah Awalya R. (17/411107/SV/13034)
- Habib Warih Kusuma (17/415740/SV/13605)
- Muhammad Yusuf I.M (17/415752/SV/13617)
Recent Comments