Robotic technology towards industry 4.0: Automatic object sorting robot arm using kinect sensor
Abstract
As one of the most commonly employed robots in manufacturing business, robot arm has to develop into a technology capable of successing the industry 4.0 revolution. A robot arm that can interact well with humans to solve a problem becomes one of the encouraging research topics. It requires the ability to behave like humans which causes a robot arm should be utilizing intelligent peripherals. This study aims to create a robot arm design that uses a Kinect sensor as a smart peripheral to approach the human ability to see an object. As a case study, a color-based object sorting simulation was conducted. The automatic movement that the robot used is based on inverse kinematics. The experimental test shows that average percentage errors for end-effector’s position in x, y and z coordinates are 5.83%, 5.89% and 8.59%, respectively. This result has led the robot arm equipped with the Kinect sensor managed well to sort and move objects based on the color.
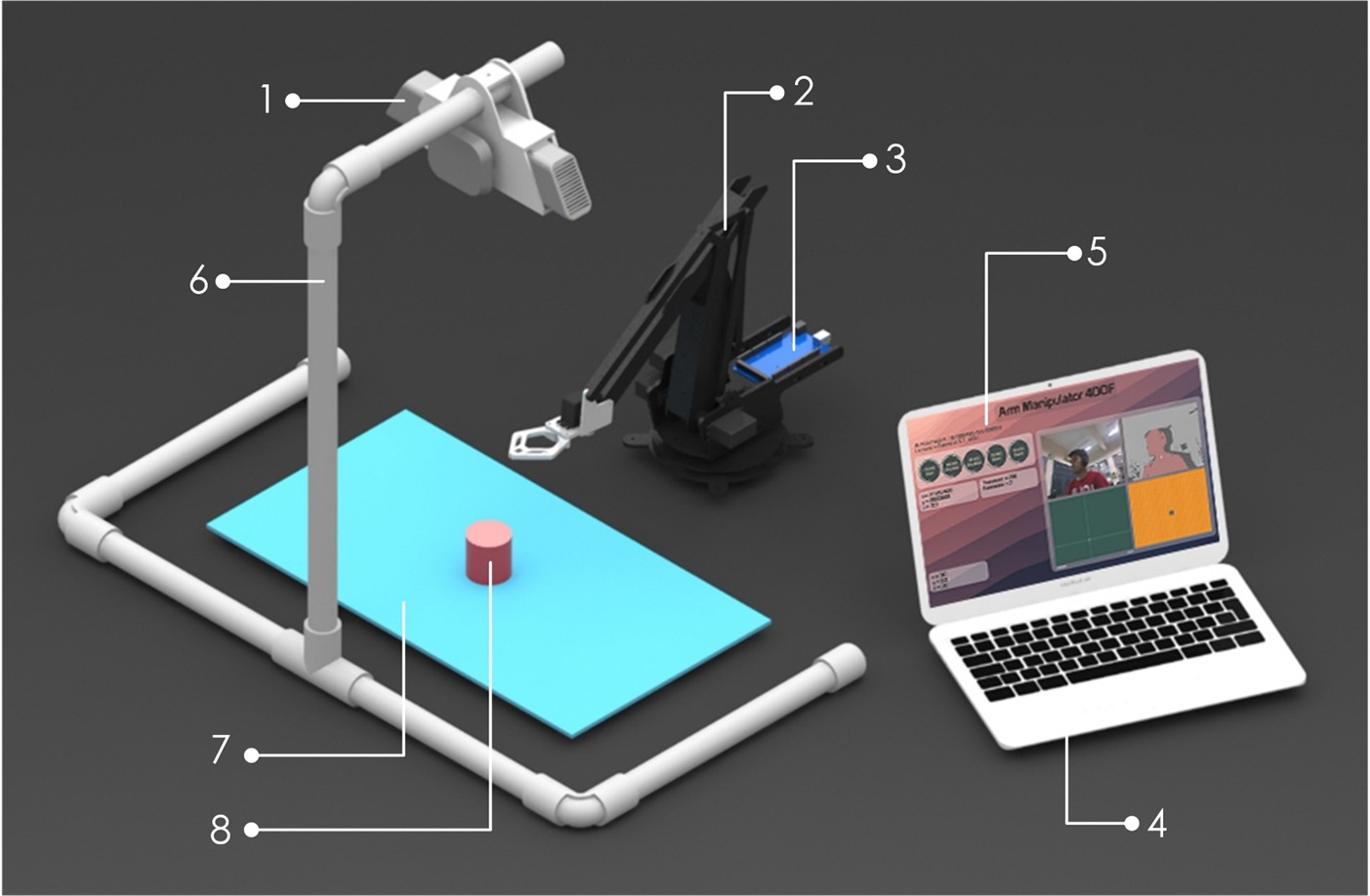
1.Kamera Kinect
2.Robot Lengan 4DOF
3.Arduino Mega 2560
4.Personal Computer
5.GUI Processing IDE
6.Mounting Kamera
7.Workspace
8.Objek
Video experiment on Youtube:
more detail visit our publication here
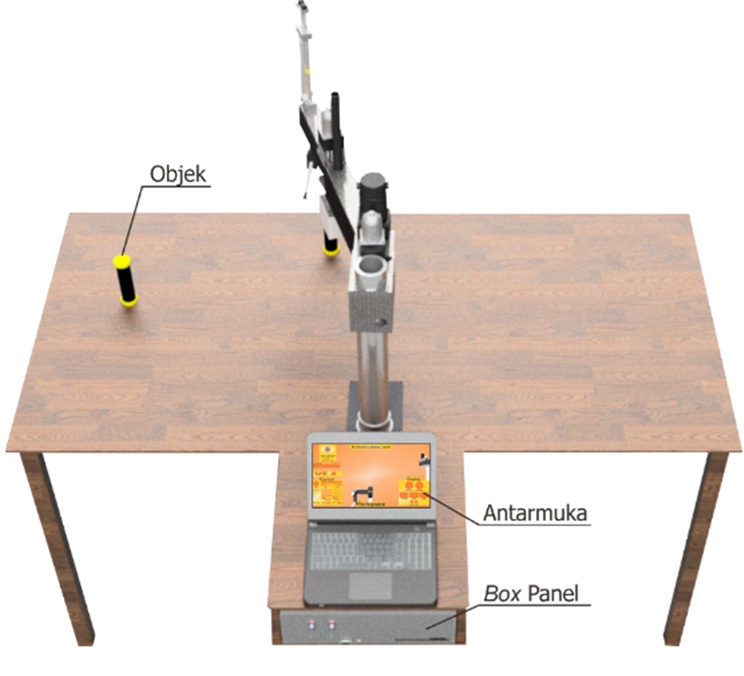
Kinematika dan Antarmuka Robot SCARA Serpent
Abstract
This paper presents position control of the SCARA Serpent robot using kinematics equations and Processing IDE-based interfaces. The interface aims to make it easier in controlling the SCARA Serpent robot and to get object coordinate data. This data are used as input to the reverse kinematics equation to determine the angle of each joint. To get good SCARA Serpent robot movement results, Proportional, Integral, Differential (PID) control is applied in controlling the position of each joint. In the testing, the SCARA Serpent robot is tested with three tests, namely joint angle testing, end- ffector coordinate testing, and PID control testing. From the test results, the system can run well. The results of the PID control parameters were obtained by experimental tuning with parameters Kp = 5.5, Ki = 0.001 and Kd = 10 for the joint shoulder angle of the SCARA Serpent robot towards zero steady state error.
Video experiment on Youtube:
more detail visit our publication here
Recent Comments