

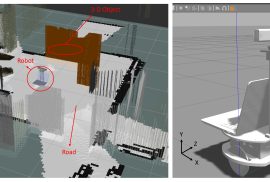
Dalam upaya mendukung pencapaian Sustainable Development Goals (SDGs), khususnya pada tujuan Industri, Inovasi, dan Infrastruktur (SDG 9), penelitian terkait sistem navigasi robotik terus dikembangkan untuk menciptakan teknologi yang efisien dan cerdas. Salah satu inovasi yang menarik perhatian adalah penerapan metode RGBD SLAM (Simultaneous Localization and Mapping) dalam pemetaan posisi mobile robot menggunakan kamera Kinect. Teknologi ini memungkinkan robot untuk mengenali lingkungan secara tiga dimensi dan menentukan posisinya secara real-time tanpa bantuan sistem penanda eksternal.







Recent Comments