
Perkembangan teknologi serta ilmu pengetahuan dari masa ke masa semakin berkembang. Perkembangan ini dapat dilihat pada banyaknya penggunaan robot dibidang industri. Pemilihan robot untuk menggantikan pekerjaan manusia tidak terlepas dengan berbagai kelebihannya. Salah satu kelebihannya, robot dapat melakukan suatu pekerjaan yang sama dan berulang tanpa merasakan lelah seperti halnya manusia
Salah satu dari jenis robot yang sering digunakan dalam dunia indutri adalah robot lengan selective compilance assembly robot arm atau biasa dikenal dengan robot SCARA Serpent. Robot SCARA terdiri dari base, lengan shoulder, elbow dan end-effector. Posisi end-effector pada robot SCARA berada pada sebuah koordiant kartesian (x, y). Dalam sistem, nilai koordinat (x, y) diubah menjadi sebuah nilai sudut lengan shoulder dan elbow dengan menggunakan sebuah persamaan kinematika balik.
Salah satu topik yang sedang dikembangkan juga pada saat ini adalah pengolaha citra (image processing). Penggunaan pengolahan citra dapat diaplikasikan untuk banyak hal seperti mendeteksi jenis warna, bentuk, hingga ketinggian dari objek. Dengan menawarkan beberapa keungggulan, pengolahan citra untuk saat ini sedang dikembangkan untuk digunakan di dalam dunia industri agar dapat bekerja lebih maksimal.
Desain Mekanis Robot SCARA Serpent
Robot SCARA Serpent merupakan robot yang meiliki tiga joint yang terletak pada shoulder, elbow, dan end-effector. Seluruh joint kebebasan menggunakan sebuah motor DC yang didalamnya terdapat gear box. Pergerakan pada masing-masing joint memiliki jangkauan maksimum yang berbeda-beda. Desain mekanis serta dimensi dari robot SCARA Serpent ditunjukkan pada Gambar 1.
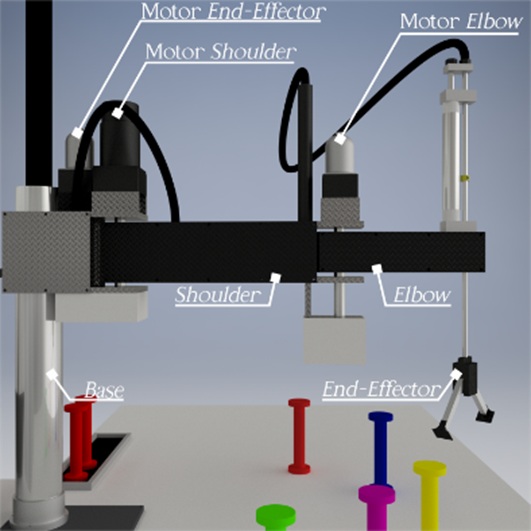
Gambar 1. Desain mekanis dan dimensi robot SCARA Serpent SCARA
Selain desain mekanik utama pada robot lengan, sebuah holder juga perlu dibuat sebagai penyangga atau holder kamera web. Kamera web ditempatkan tepat diatas robot SCARA Serpent agar dapat menangkap jenis warna objek secara maksimal. Gambar penempatan kamera web ditunjukkan pada Gambar 2.

Gambar 2. Desain holder kamera web dan penempatannya
Sistem Elektronis Robot SCARA Serpent
Arduino Mega 2560 berperan sebagai otak utama dalam mengendalikan seluruh kinerja sistem pada robot lengan SCARA Serpent. Arduino Mega 2560 memiliki banyak pin keluaran dan masukan digital serta pin analog yang dapat digunakan sebagaipengendali dari setiap komponen. Pin analog yang pada Arduino Mega 2560digunakan untuk menerima feedback masukkan dari potensiometer yang ada pada setiap motor. Beberapa pin digital pada Arduino Mega 2560 digunakan sebagai pin pulse with modulation (PWM) yang nilai keluarannya dapat diatur. Pin PWM digunakan untuk mengontrol kecepatan dan arah putar pada driver motor. Gambar 3 merupakan sistem elektronis keseluruhan robot SCARA Serpent yang terdapat di dalam box panel dan Tabel 1 merupakan keterangan dari masing-masing komponen.

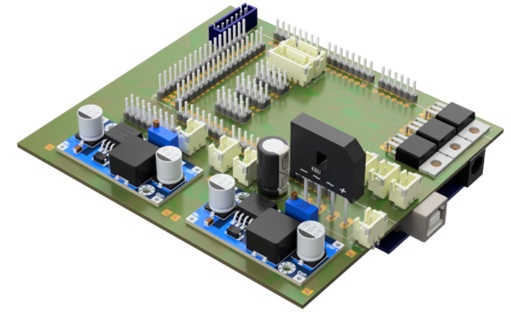
Gambar 3. Sistem elektronis keseluruhan robot SCARA Serpent
Table 1 Keterangan Sistem elektronis keseluruhan robot SCARA Serpent
| No | Keterangan |
| 1 | Connector Utama |
| 2 | Kipas |
| 3 | Vale Relay Pneumatic |
| 4 | Switch motor dan pneumatic |
| 5 | Connector Remote |
| 6 | Connector Arduino Mega 2560 |
| 7 | Board Utama |
| 8 | Driver motor EMS 30A H-Bridge |
| 9 | Transformator |
| 10 | Switch AC |
| 11 | Connector utama |
Antarmuka Kinematika dan Olah Citra Robot SCARA Serpent
Perangkat lunak yang digunakan adalah software Processing IDE. Processing IDE dirancang agar menghasilkan sebuah antarmuka yang cocok dan sesuai dengan fungsi robot SCARA Serpent. Pada antarmuka terdapat beberapa mode untuk mengoperasikan robot SCARA Serpent. Mode utama adalah mode untuk mendeteksi warna objek berdasarkan jenis warnanya. Tersedia pilihan lima jenis warna yang membuat robot SCARA Serpent akan mengambil objek tersebut setelah warna dipilih yaitu merah, hijau, biru, kuning, dan merah muda. Sedangkan untuk mode lain terdapat mode manual, dan mode kinematika balik. Tampilan antarmuka robot SCARA Serpent ditunjukkan pada Gambar 4 dan penjelasan pada masing-masing bagian ditunjukkan pada Tabel 2.

Gambar 4. Desain antarmuka robot SCARA Serpent
Tabel 2. Fungsi tiap bagian anatrmuka robot SCARA Serpent
| No | Nama | Fungsi |
| 1 | Judul dan Identitas | Menampilkan judul dan identitas |
| 2 | Koneksi | Menentukan komunikasi dengan hardware |
| 3 | Mode | Memiliyh mode yang digunakan |
| 4 | Kelompok Kontrol | Kontrol perintah untuk robot |
| 5 | Desain 3D | Tampilan animasi 3d |
| 6 | Tampilan data | Menampilkan data-data terkait pergerakan robot |
| 7 | Tampilan pengolahan citra | Menampilkan tangkapan layar dari kamera web |
Simulasi Pengujian Sortir Warna
Pada pengujian simulasi warna dilakukan simulasi robot lengan untuk menggolongkan objek sesuai dengan jenis warna yang dipilih. Simulasi ini dilakukan dengan menempatkan beberapa objek dengan warna yang berbeda pada workspace robot SCARA Serpent. Kamera web dihubungkan dengan personal komputer yang digunakan untuk menjalankan antarmuka. Pertama robot lengan berada posisi awal yaitu pada koordinat x=0, dan y=90. Posisi tersebut merupakan posisi standby dari robot SCARA Serpent sebelum diberikan perintah. Kamera web yang terletak diatas workspace akan memindai jenis warna dari objek yang berada pada workspace. Selanjutnya pada antarmuka diawali dengan memilih mode deteksi warna yang nantinya akan menunjukkan beberapa pilihan jenis warna. Pilihan jenis warna ini merupakan warna objek yang ada pada sistem. Dengan memilih jenis warna untuk objek yang akan diambil maka sistem dapat dimulai. Setelah warna dipilih maka Processing IDE akan mencari objek dengann warna tersebut. Pencarian dilakukan dengan mencocokan piksel demi piksel dengan dibandingkan nilai red, green, blue sesuai dengan warna yang dipilih. Deteksi warna yang cocok dilakukan sangat cepat dan akurat. Piksel yang cocok telah memiliki posisi masing-masing berupa koordinat (x, y) yang kemudian digunakan sebagai masukan kinematika balik yang ada pada Processing IDE.
Hasil perhitungan kinematika balik berupa nilai sudut untuk joint shoulder dan joint elbow yang telah dikirimkan Processing IDE ke Arduino Mega 2560 melalui komunikasi serial. Tidak berselang lama, kemudian robot SCARA Serpent mulai menuju posisi dari objek berada. Setelah berada tepat di atas objek posisi end-effectornya maka sistem mendeteksi dengan membandingkan perhitungan kinematika maju dari data sudut yang didapat dari feedback potensiometer pada robot SCARA Serpent dengan posisi koordinat objek yang sudah diketahui sebelumnya. Jika perbedaan kurang dari 5% maka end-effector bergerak turun dan mengambil objek tersebut dan membawanya pada drop point yang terletak pada ujung workspace. Setelah objek berhasil diletakkan pada drop point robot SCARA Serpent akan melakukan pengambilan pada objek selanjutnya jika terdapat warna yang sama. Jika tidak ada maka robot SCARA Serpent akan kembali pada posisi awal dan menunggu perintah selanjutnya yang diberikan oleh user melalui antarmuka. Gambar 5. merupakan gambaran lengkap simulasi dari sortir warna pada robot SCARA Serpent.
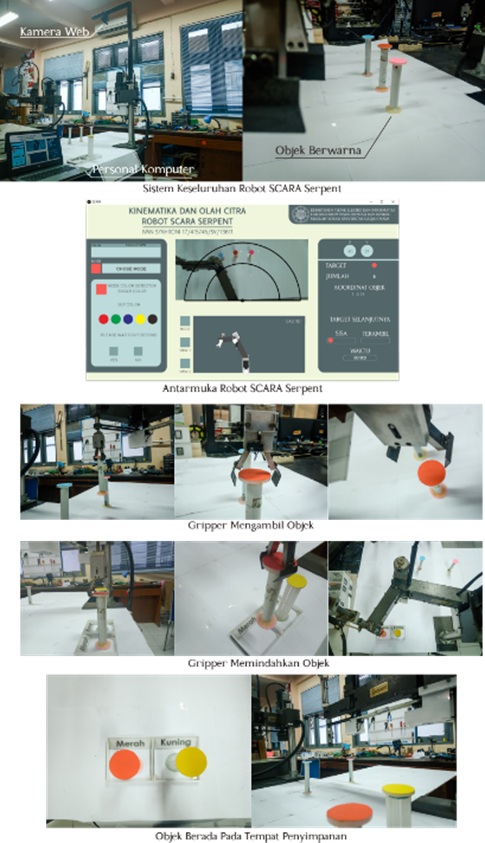
Gambar 5. Simulasi Pengujian Sortir Warna
Video hasil percobaan disajikan sebagai berikut:
Disusun oleh: Ivan Syahroni H (17/415746/SV/13611)