
Kemajuan pesat teknologi dalam beberapa tahun terakhir telah meningkatkan minat masyarakat umum tentang penggunaan teknologi dalam kehidupan sehari-hari khususnya dalam bidang otomasi dan robotika. Di sektor robotika, perkembangan teknologi yang cepat telah membawa perubahan revolusioner dalam proses otomasi industri. Robot kini digunakan secara luas di berbagai bidang, seperti manufaktur, pertanian, kesehatan, dan logistik untuk meningkatkan produktivitas dan efisiensi kerja. Pada bidang manufaktur dan logistik, robot otonom membantu meningkatkan efisiensi, mengurangi biaya, dan memastikan keselamatan dengan melakukan tugas-tugas berisiko secara rutin dan otomatis. Dalam bidang kesehatan, robotrobot membantu dalam perawatan pasien, pengiriman obat, dan menjaga kebersihan lingkungan. Sedangkan di bidang pertanian, robot-robot otonom membantu meningkatkan hasil panen dan menjaga kualitas tanaman melalui teknik pertanian yang lebih presisi . Untuk memungkinkan robot mencapai tujuan tersebut, berbagai metode dan algoritma dikembangkan guna memudahkan pengendalian robot dalam menyelesaikan tugas-tugas yang kompleks.
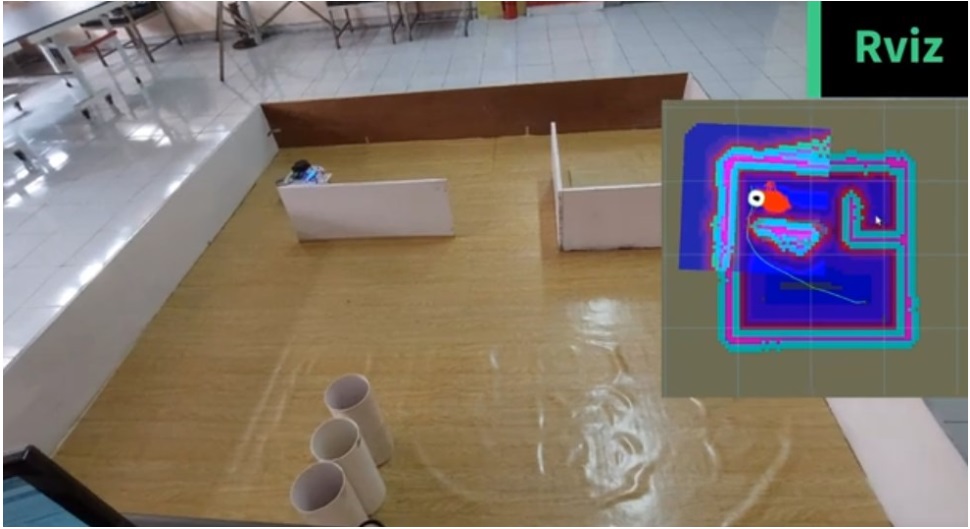
Robot Operating System (ROS) merupakan salah satu contoh dari pengembangan di bidang robotik. ROS menyediakan struktur dan alat yang memudahkan pengembangan aplikasi robotik, serta mendukung interaksi antar komponen sistem. Salah satu contohnya adalah digunakan untuk navigasi, memungkinkan pemetaan lingkungan yang belum dikenal, dimana peta tersebut disimpan sebagai data awal (peta statis). Peta ini kemudian berfungsi sebagai acuan bagi robot untuk bergerak di dalam lingkungan tersebut dan berpindah dari satu titik ke titik lainnya dengan menghindari rintangan. Algoritma tersebut dinamakan Simultaneous Localization and Mapping(SLAM).
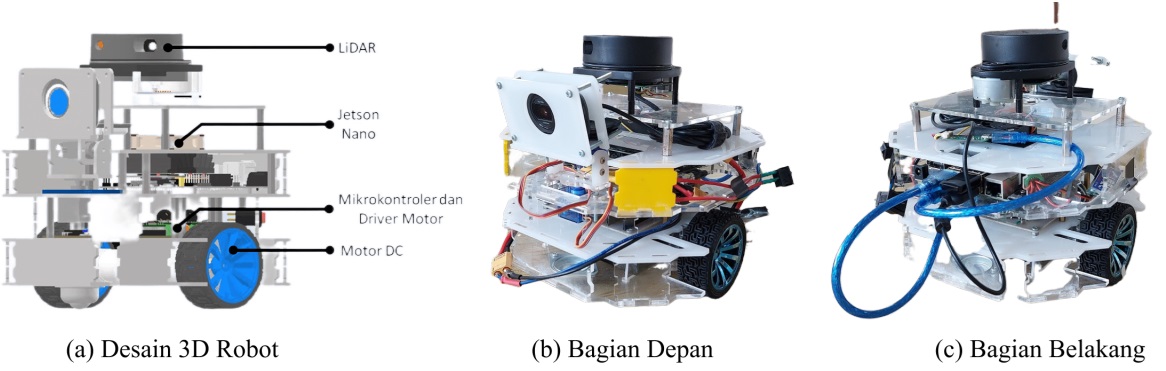
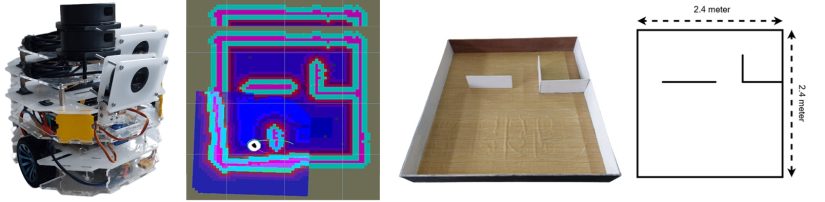
Pada penelitian ini, menggunakan salah satu algoritma SLAM yaitu Hector SLAM, yang memanfaatkan data pemindaian laser untuk melokalisasi robot. Meskipun berbasis pada data pemindaian laser, hasil lokalisasinya tetap akurat dan stabil. SLAM memerlukan sensor seperti LiDAR yang merupakan teknologi navigasi dengan mendeteksi objek berdasarkan distribusi cahaya . Teknologi ini memancarkan sinar laser ke suatu area, lalu mengukur waktu yang dibutuhkan untuk menerima pantulan sinyal dari objek yang terdeteksi.
[embedyt] https://www.youtube.com/watch?v=pN8gDxHVUxY[/embedyt]