Self-driving Car Robot menjadi representasi nyata dari sistem yang sedang dikembangkan di industri otomotif masa kini, sehingga Capstone Project ini juga memberi wawasan tentang tren teknologi yang relevan. Selain memperkuat pemahaman teknis lintas bidang seperti elektronika, pemrograman, dan robotika, proyek ini juga melatih keterampilan berpikir logis, pemecahan masalah, dan kerja tim. Secara keseluruhan, membuat robot self-driving car adalah media belajar yang tidak hanya edukatif, tapi juga menyenangkan dan menantang.
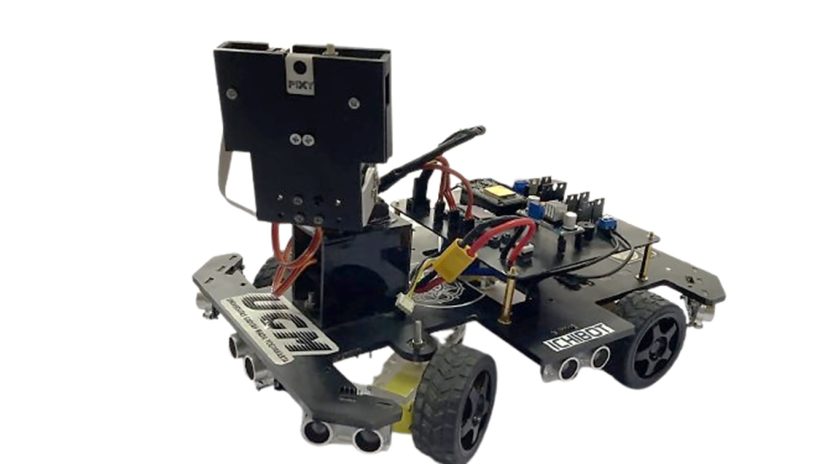
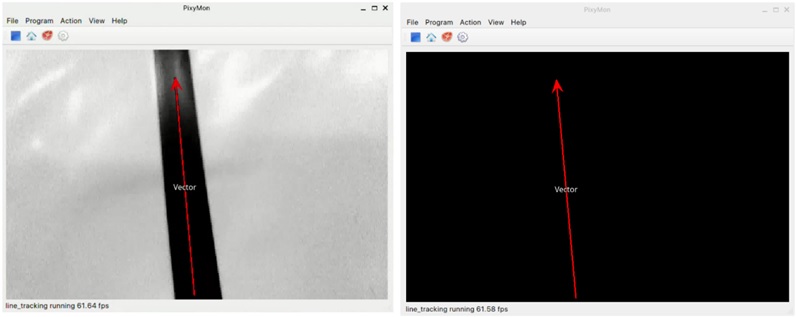
Robot ini dirancang untuk mengikuti jalur secara otomatis menggunakan sistem navigasi berbasis penglihatan. Kamera Pixy2 mendeteksi jalur berdasarkan kontras warna dan mengirimkan data vektor ke mikrokontroler ESP32. Data ini kemudian diproses secara real-time menggunakan algoritma kendali PID (Proportional–Integral–Derivative) untuk menentukan arah belok dan mengoreksi posisi, sehingga robot dapat bergerak secara mandiri dan tetap berada pada jalur yang terdeteksi.
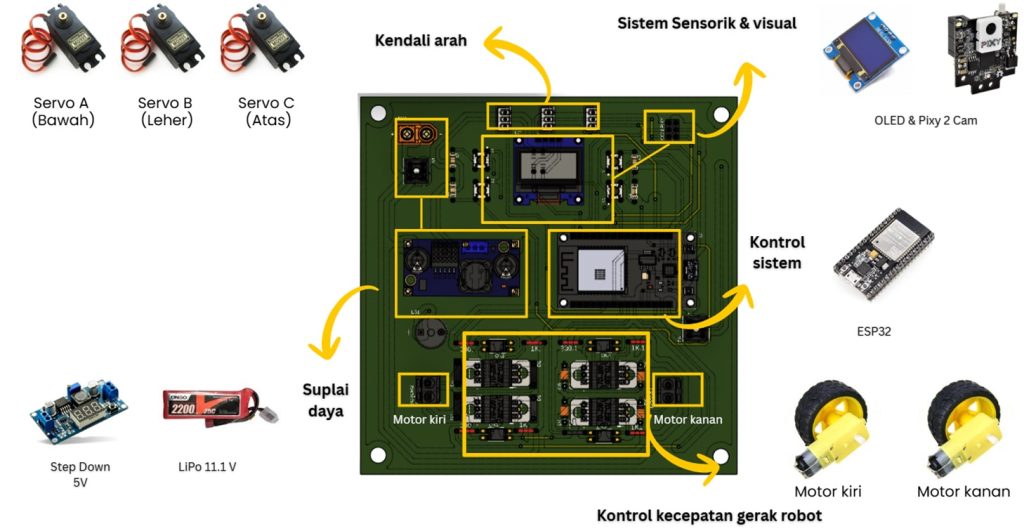
Secara sistemik, robot ini menggabungkan berbagai elemen kendali otomatis: pemrosesan visual, aktuator mekanik, pengendali logika, hingga antarmuka pengguna. Mikrokontroler ESP32 menjadi pusat pemrosesan, sedangkan komponen seperti motor DC, servo, optocoupler, dan MOSFET terintegrasi dalam papan sirkuit cetak (PCB) modular berukuran 14 × 14 cm.
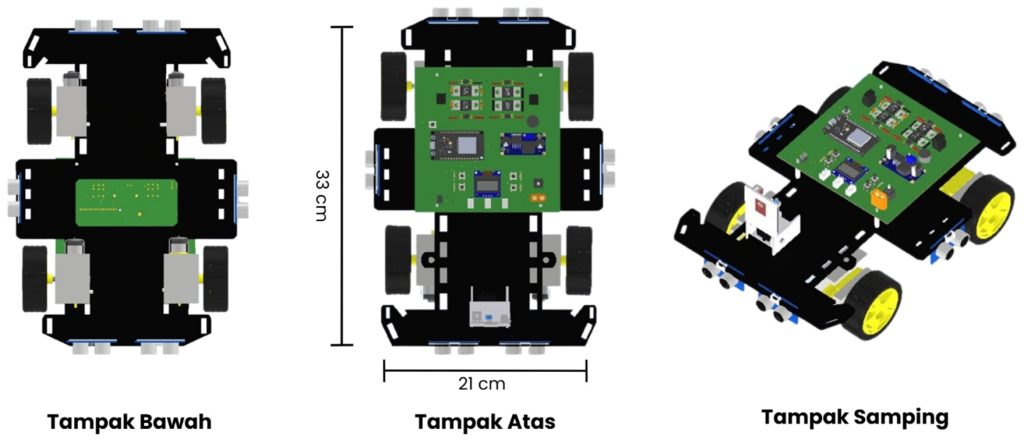
Desain sasis yang kompak berukuran 33 × 21 cm dirancang untuk menjaga stabilitas dan keseimbangan beban. Penempatan komponen dilakukan strategis, memperhatikan sirkulasi udara dan kemudahan perawatan.
Robot juga dilengkapi dengan layar OLED dan tombol navigasi yang memudahkan pengguna dalam mengatur parameter sistem seperti kecepatan, sudut servo, dan nilai PID. Semua pengaturan dapat dilakukan tanpa komputer eksternal, menjadikan prototipe ini mudah digunakan di lingkungan laboratorium atau pendidikan. Dari sisi perangkat lunak, program utama dikembangkan menggunakan bahasa C++ dan berjalan pada mikrokontroler ESP32. Program mencakup logika navigasi, pengendalian motor, pengaturan antarmuka OLED, serta perhitungan PID berbasis input visual.