
Robotika dalam industri sebenarnya sudah ada sejak lama, mulai sekitar abad 19 awal. Perlahan tapi pasti, robot pun akhirnya jadi andalan untuk menggantikan peran yang tak mungkin bisa dikerjakan manusia. Robot pertama yang dikenal dibangun pada 1937, diprogram untuk menyusun balok-balok kayu. Robot industri ini diciptakan dengan tujuan untuk mempercepat proses di pabrik, meningkatkan produktivitas pabrik. Seiring waktu, teknologinya bertumbuh semakin maju, aplikasi robotika juga semakin mutakhir dan maju. Mulai dari sekadar memilih dan meletakkan, hingga pada proses perakitan dan pengelasan.
Sehingga diperlukan pemahaman mendasar dalam membangun sebuah arm robot, untuk tahap awal pada pembuatan arm robot dibutuhkan simulasi untuk memastikan apakah arm robot mampu untuk merespon input yang diinginkan, selain melakukan simulasi respon dari arm robot juga diperlukan desain yang mampu untuk merepresentasikan respon dari sistem. Pada simulasi yang menjadi poin penting dalam mendapatkan respon yang diinginkan adalah dengan memahami karateristik dari actuator arm robot yang akan disimulasikan, seperti model dan parameter motor DC berikut:

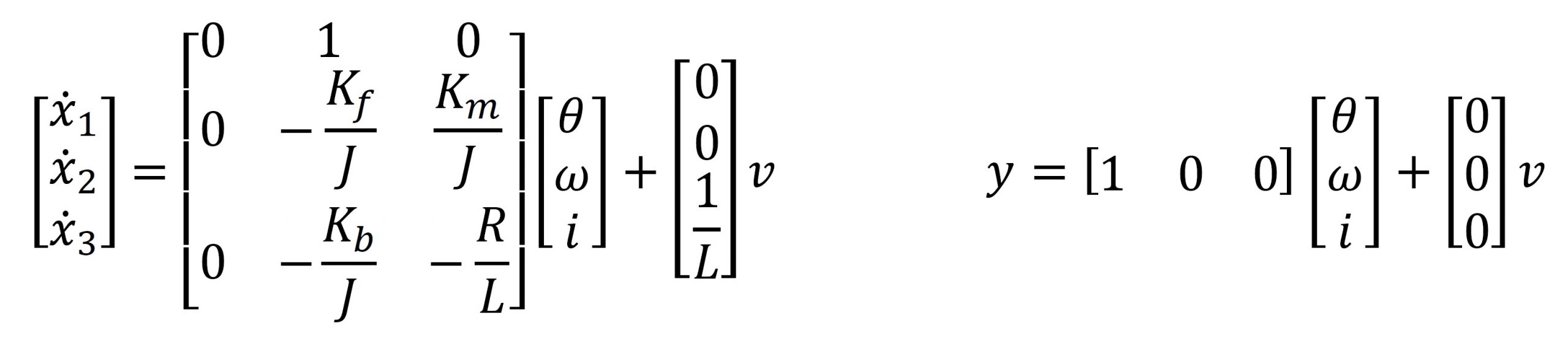
Selanjutnya untuk pemodelan sistem, pemodelan matematis, dan simulasi secara lengkap dapat dilihat pada video berikut.
Disusun oleh Fauzan Sabilal M (19/450990/SV/17267)