Pada dunia industri robot lebih dipilih dari pada tenaga manusia tidak terlepas dari berbagai kelebihannya. Salah satu kelebihan yang dipunyai adalah robot mam- pu melakukan pekerjaan yang dianggap berat oleh manusia sekalupun tanpa merasa lelah. Pekerjaan ini biasanya ditemui dalam bidang industri khususnya pada bagian produksi. Robot Mecanum dalam dunia industri dapat digunakan sebagai peningkat mobilitas pada suatu pabrik. Dengan adanya robot Mecanum, mobilitas barang dari satu tempat ke tempat lain dapat lebih cepat yang mana robot Mecanum mempunyai manuver yang luas dan dapat dengan mudah untuk dikendalikan.
Dalam beberapa tahun terakhir berbagai jenis lengan robot telah dikembangkan, termasuk untuk kebutuhan khusus pada bidang industri, kesehatan, dan militer. Robot lengan merupakan robot yang mempunyai kemampuan seperti lengan manusia. Robot ini juga dipilih oleh banyak dunia industri sebagai pengganti tenaga manusia. Robot ini memiliki bentuk fisik seperti halnya lengan manusia dan memiliki derajat kebebasan (degree of freedom). Robot lengan biasa digunakan sebagai aktuator untuk mengambil atau menaruh suatu objek pada sebuah proses produksi sehingga waktu produksi suatu barang dapat dipercepat dan lebih efisien.
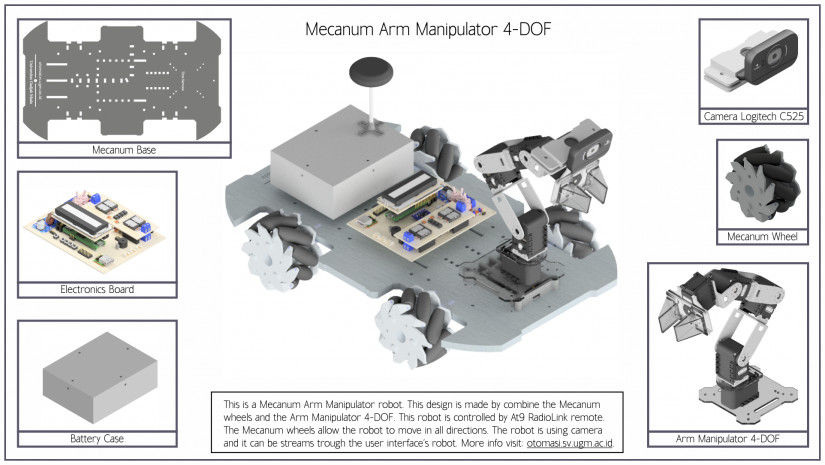
Tim Menara Ilmu Otomasi SV UGM mencoba mengkombinasikan kedua robot jenis robot tersebut menjadi robot Mecanum arm manipulator 4-DOF dimana robot tersebut mempunyai mobilitas yang baik dan juga mempunyai kemampuan layaknya lengan manusia. Prototipe robot yang dibuat ini dapat dikembangkan lebih lagi untuk dunia industri sebagai robot pengangkut barang atau pada dunia militer dapat dikembangkan sebagai robot penjinak bom dan robot pengintai.
Desain Mekanik
Desain robot Mecanum ini mempunyai tiga pokok utama yaitu desain base Mecanum, pengunci motor DC, dan juga tempat baterai. Desain ini dibuat menggunakan software Autodesk Inventor. Bahan yang digunakan untuk robot Mecanum ini adalah menggunakan bahan acrylic. Desain robot Mecanum yang telah dibuat dikonversi ke dalam format dua dimensi yang mana digunakan untuk mencetaknya dengan mesin laser cutting pada acrylic yang ada. PhantomX Pincher robot arm merupakan robot arm dengan derajat kebebasan sebanyak 4-DOF yang dibuat oleh Trossenrobotics. Robot lengan ini digunakan sebagai acuan dalam membuat robot arm yang akan disatukan dengan robot Mecanum.


Desain Elektronis
Pada perancangan elektronis ini bertujuan untuk membuat board sistem minimum dengan menggunakan Teensy 3.5 yang dapat digunakan untuk mengatur 4 buah motor DC dan juga mengendalikan servo Dynamixel AX-18A supaya robot dapat berjalan dan melaksanakan tugas dari program yang diberikan pengguna kepada robot. Pada robot Mecanum arm ini menggunakan Teensy 3.5 sebagai kontroler utama untuk mengendalikan seluruh sistem pada robot Mecanum arm ini. Peletakan board ini diletakkan pada atas robot Mecanum. Elektronis robot Mecanum arm ini terdapat beberapa bagian utama antara lain: power supply, driver motor, komunikasi Dynamixel, sensor IMU, dan penampil LCD. Sistem ini menggunakan beberapa piranti masukan dan keluaran yang dikendalikan seutuhnya oleh Teensy 3.5.
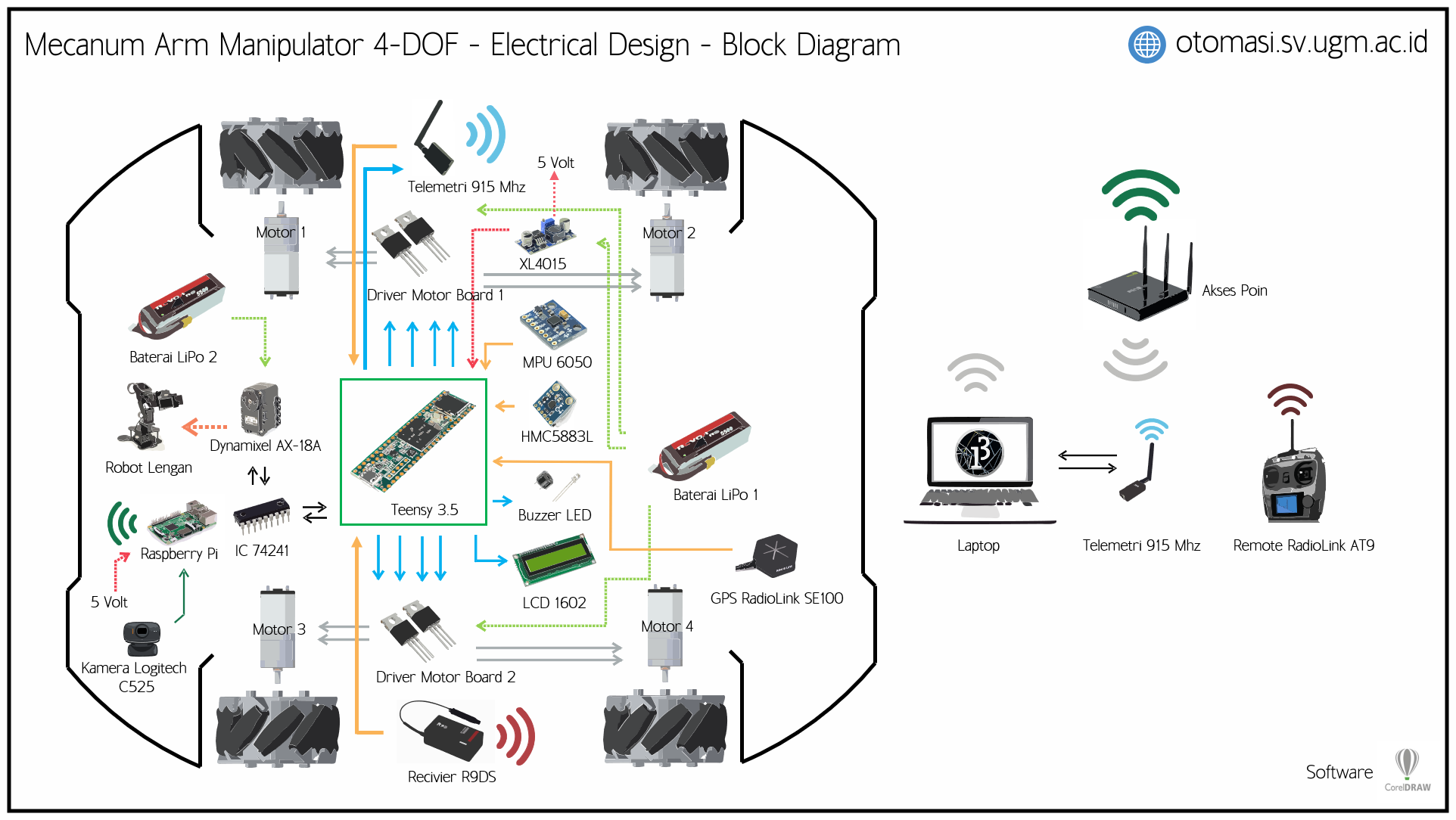
Perangkat masukan dari sistem ini yaitu sensor IMU, tombol, dan feedback dari servo Dynamixel. Sistem ini menggunakan empat driver motor DC yang digunakan untuk menggerakkan motor DC. Selain itu menggunakan IC 74241 sebagai penjembatan komunikasi antara Teensy 3.5 dengan servo Dynamixel. Sebagai user interface digunakan software Processing IDE yang digunakan sebagai penampil visualisisi robot Mecanum arm manipulator 4-DOF.

Perangkat masukan dari sistem ini yaitu sensor IMU, tombol, dan feedback dari servo Dynamixel. Sistem ini menggunakan empat driver motor DC yang digunakan untuk menggerakkan motor DC. Selain itu menggunakan IC 74241 sebagai penjembatan komunikasi antara Teensy 3.5 dengan servo Dynamixel. Sebagai user interface digunakan software Processing IDE yang digunakan sebagai penampil visualisisi robot Mecanum arm manipulator 4-DOF.
Rangkaian Catu daya merupakan rangkaian yang digunakan untuk menyuplai kebutuhan daya rangkaian agar dapat digunakan dan berjalan dengan baik. Pada robot Mecanum arm ini menggunakan dua suplai yakni suplai pertama untuk mensuplai untuk keseluruhan shield/board termasuk suplai Teensy 3.5 dan sensor yang digunakan, dan suplai kedua digunakan khusus untuk mensuplai servo Dynamixel AX-18A. Secara keseluruhan shield terdapat dua level tegangan yakni 5 Volt dan 12 Volt. Suplai pertama dan kedua sama-sama menggunakan baterai berjenis lithium polymer battery atau sering disebut dengan nama baterai LiPo. Baterai LiPo yang digunakan berkapasitas 5500 mAh 3 sel dengan tegangan keluaran sebesar 12.6 Volt (full charge).Suplai pertama ini membutuhkan tergangan sebesar 5 Volt, karena baterai yang digunakan mempunyai tegangan keluaran sebesar 12.6 Volt, maka tegangan tersebut harus diturunkan. Penurunan tegangan keluaran baterai LiPo ini menggunakan modul LM2596 DC to DC step down regulator. Modul LM2596 tersebut diatur sedemikian sehingga menghasilkan tegangan keluaran sebesar 5 Volt yang dibutuhkan oleh Teensy 3.5 dan beberapa komponen tambahan lain seperti LCD 1602 dan juga sersor IMU MPU-6050. Pengaturan tersebut dapat dilakukan dengan memutar potensiometer sehingga tegangan dapat tu-run menjadi 5 Volt.Suplai kedua pada board ini digunakan untuk menyuplai daya kepada Dynamixel AX-18A yang mana mempunyai spesifikasi tegangan yang dibutuhkan sebesar 9 Volt sampai dengan 12 Volt. Baterai LiPo langsung dihubungkan menuju Dynamixel AX-18A karena baterai tersebut sudah mengeluarkan tegangan yang dibutuhkan oleh servo Dynamixel AX-18A yaitu sebesar 12 Volt.
Driver motor DC diperlukan sebagai pengatur kendali tegangan yang masuk pada motor DC, dimana motor DC akan menggerakan roda Mecanum agar robot Mecanum dapat berjalan. Rangkaian driver motor ini menggunakan 2 jenis MOSFET yakni MOSFET IRF9530 (PNP) dan juga MOSFET IRF530 (NPN), menggunakan Optocoupler PC817, dan beberapa resistor yang ketiganya mempunyai fungsinya masing-masing. Robot Mecanum sendiri membutuhkan 4 motor DC sebagai penggerak, dalam mengontrol 1 motor DC dibutuhkan 2 MOSFET IRF9530 (PNP), 2 MO- SFET IRF530 (NPN), 2 Optocoupler PC817, dan 4 resistor. Mosfet yang digunakan bekerja secara berpasangan, jika satu pasang (IRF530 dan IRF9530) aktif maka pasangan yang lain tidak aktif. Hal tersebut menyebabkan perbedaan polaritas sehingga motor DC dapat berputar dua arah (clockwise dan couterclockwise). Dioda tersebut berguna unutuk mengatasi lonjakan tegangan yang terjadi pada saat motor DC tersebut diberi tegangan kemudian diputuskan mengingat motor DC merupakan beban induktif. Fungsi dioda yang lain adalah untuk memproteksi dari arus balik dari motor DC mengingat motor DC yang berputar juga dapat menghasilkan tegangan sendiri akibat efek medan magnet. Optocoupler merupakan komponen yang dapat berfungsi sebagai penghubung terisolasi melalui media cahaya. Optocoupler mempunyai dua bagian yakni pengirim cahaya dan penerima cahaya. Masing-masing bagian tidak terhubung langsung secara konduktif melainkan melalui media cahaya. Rangkaian bagian driver motor ini menggunakan beberapa resistor. Resistor pada kaki anoda berfungsi untuk membatasi arus yang masuk pada led di dalam Optocoupler agar tidak rusak. Resistor pada kaki Gate (G) dan Drain (D) MOSFET berfungsi sebagai pembagi tegangan agar mempunyai nilai yang berbeda antara kedua terminal tersebut. Driver motor ini mengakibatkan space/dimensi shield besar dikarenakan banyaknya komponen yang digunakan unutuk membuat satu driver motor DC saja. Oleh karena itu untuk memperkecil dimensi shield maka dua driver motor dipasang secara terpisah dengan board utama. Dua driver motor ini dipasang dibawah shield utama.
Dynamixel AX-18A memiliki tambahan komponen untuk dapat berkomunikasi dengan Teensy 3.5 karena membutuhkan komunikasi half duplex dengan kecepatan 1Mbps jika servo Dynamixel yang digunakan lebih dari satu. Komponen tersebut adalah IC 74241 buffer yang mana dapat mempercepat kecepatan komunikasi half duplex yang dibutuhkan oleh Dynamixel dan Teensy 3.5 tersebut. Pengkoneksian antara Teensy 3.5 dengan IC 74241 adalah pin TX dan RX Teensy 3.5 tersambung pada pin 17 dan 18 pada IC 74241. Sedangkan pada IC 74241 menuju Dynamixel adalah berupa pin berisi data dimana yang akan terhubung dengan pin data pada servo Dynamixel AX-18A. Pin 1 dan 19 pada IC 74241 juga harus dihubungkan pada salah satu pin digital Teensy 3.5 agar dapat digunakan untuk mengontrol data IC tersebut digunakan atau tidak (data control).
Kamera protokol internet ip cammera adalah suatu jenis kamera vidio digital yang digunakan untuk mengirim data gambar maupun vidio melalui internet. Kamera jenis ini biasanya digunakan untuk pengawasan secara tidak langsung seperti CCTV. Untuk proyek akhir ini menggunakan kamera Logitech HD Webcam C525 unutuk merekam data gambar, lalu menggunakan Raspberry Pi yang digunakan untuk memproses data gambar atupun vidio tersebut menuju jaringan. Raspberry Pi pada proyek akhir ini digunakan sebagai ip cammera. Untuk dapat menjadikan Raspberry Pi sebagai ip cammera diperlukan instalasi library Motion Project pada Raspberry Pi lewat terminal.
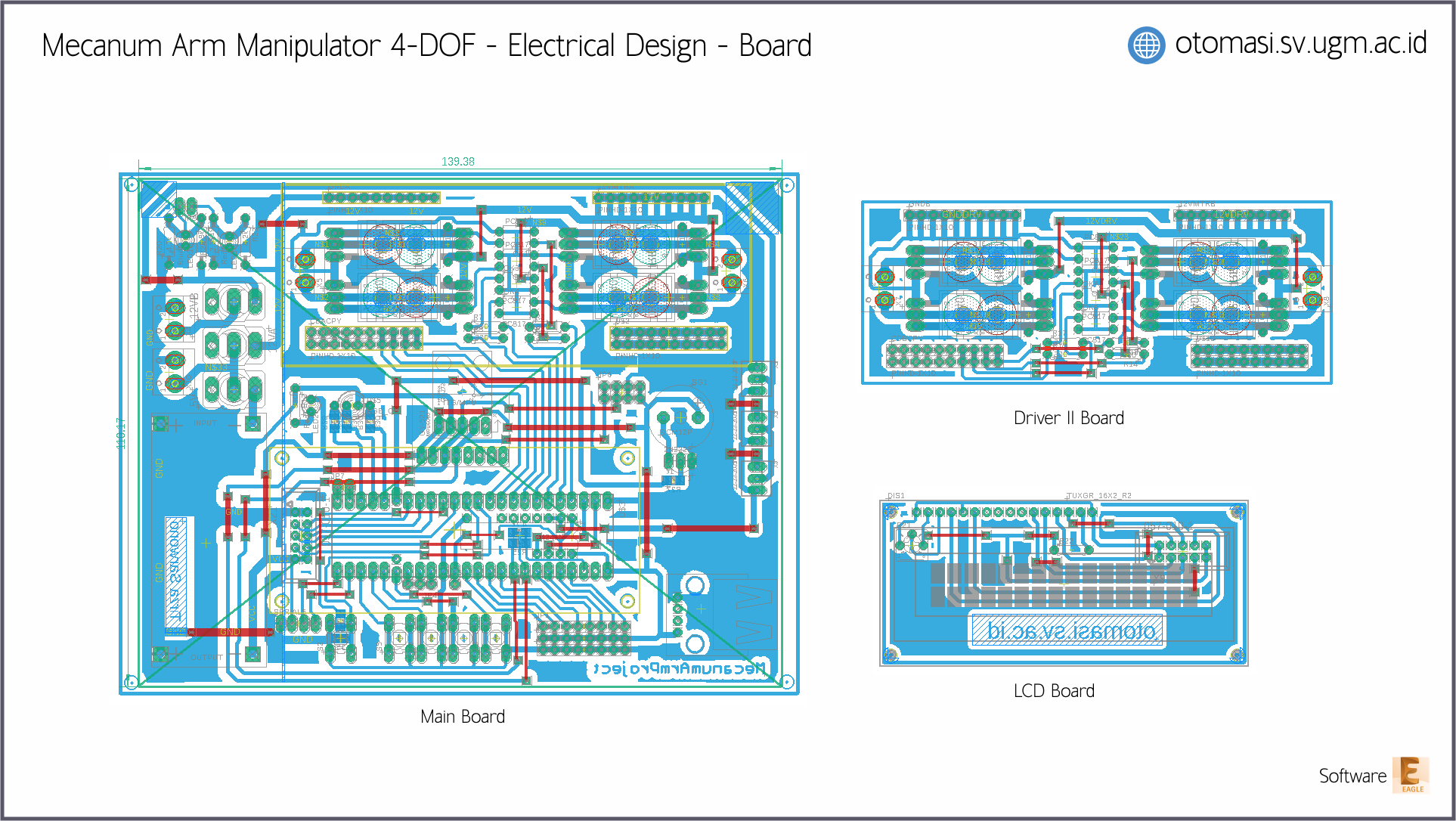
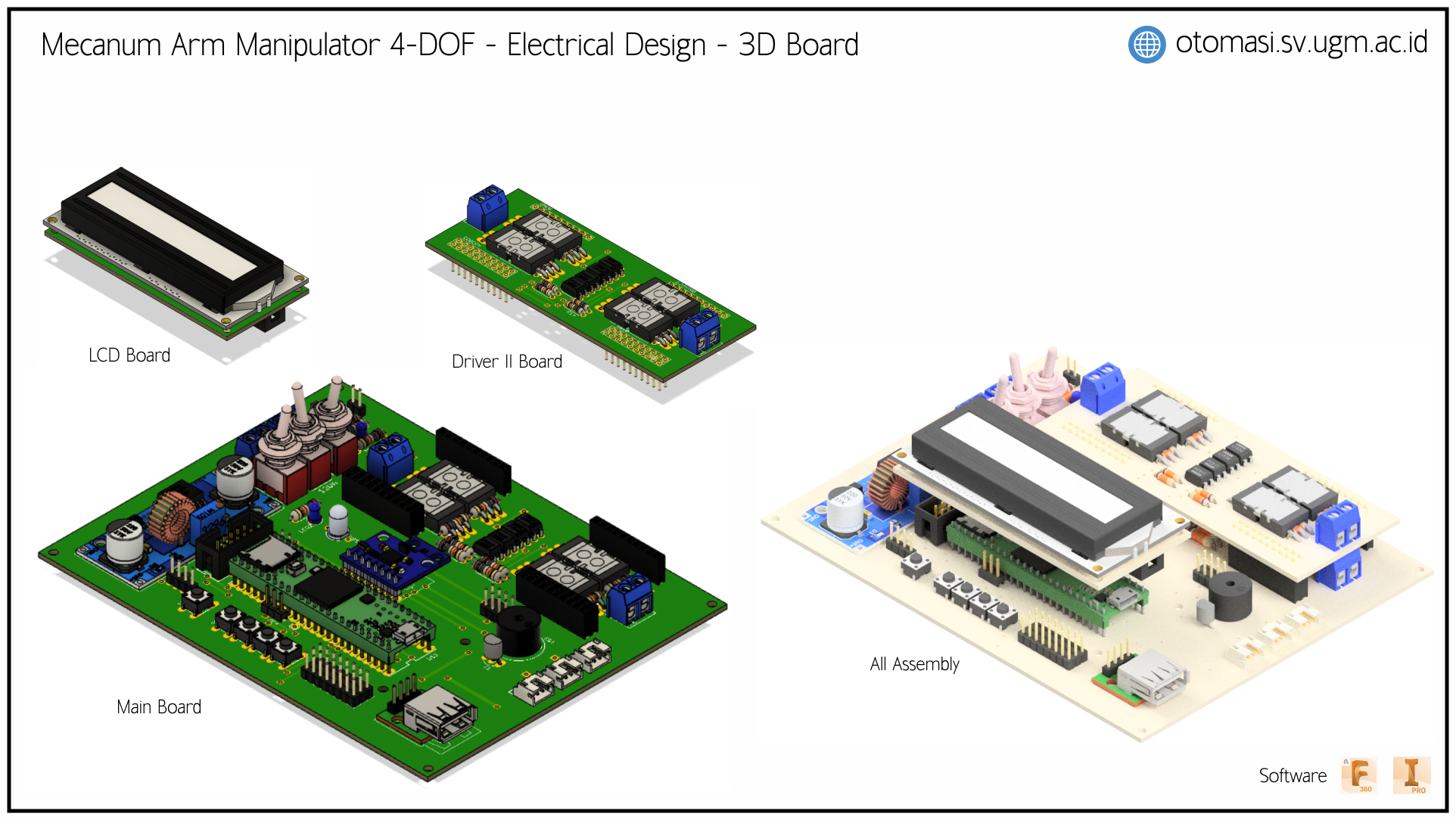
Pembuatan desain board printed circuit board (PCB) ini bertujuan untuk mengurangi jumlah penggunaan kabel, mempermudah koneksi antara Teensy 3.5 dan komponen lain yang digunakan, serta menambah kerapian dari robot yang dibuat. PCB yang dibuat pada robot ini ada dua pcb dimana pcb pertama merupakan PCB utama dan PCB kedua merupakan PCB tambahan yang berisi dua driver motor. PCB ini didesain berdasarkan skematik yang telah dibuat. PCB pertama mempunya panjang sebesar 16 cm dan lebar 12 cm. PCB ini diletakkan di atas alas robot Mecanum. PCB kedua ini merupakan PCB tambahan dimana berisi dua driver motor. PCB kedua ini berguna untuk memperkecil dimensi dari board yang dibuat, karena apabila dua driver motor ini dimasukan pada PCB pertama maka dimensi dari PCB pertama akan menjadi lebih besar. Peletakan dari board ini diletakkan diatas PCB pertama dimana terhubung menggunakan pin header untuk membuat koneksi antara PCB pertama dan kedua.
Desain Antarmuka Robot
Perangkat lunak yang dipakai merupakan software Processing IDE. GUI adalah antarmuka pada sistem operasi komputer yang menggunakan menu grafis. Menu grafis ini berarti ada tampilan yang lebih ditekankan untuk membuat sistem operasi yang memudahkan pengguna untuk mengakses sistem. GUI menggunakan tampilan grafis, dapat dikontrol menggunakan beberapa macam alat masukan, seperti mouse, keyboard, touchscreen, dan masukan lainnya. GUI dapat dibangun dengan menggunakan Processing IDE.

Antarmuka ini digunakan sebagai monitoring sensor robot dan digunakan sebagai penampil vidio dari streaming vidio oleh Raspberry Pi. Fitur dari antarmuka ini adalah adanya visualisasi dari sensor yang digunakan oleh robot yaitu sensor imu dan sensor kompas. Antarmuka ini juga telah dapat memvisualisasikan secara tiga dimensi robot yang sedang dijalankan. sehingga dapat menetahui kondisi robot apa- bila tidak dijangkau oleh mata saat pengendalian jarak jauh. Pada antarmuka ini juga terdapat beberapa menu yaitu seperti menu menampilkan kamera, menampilkan gps, dan mengirim isyarat buzzer kepada robot untuk dibunyikan.

Video Running Test

Disusun oleh: Tirza Sarwono (17/415759/SV/13624)
