Rancang Bangun Sistem Penstabil Kamera (Gimbal) dengan Logika Fuzzy untuk Pengambilan Gambar Foto dan Video
Abstrak
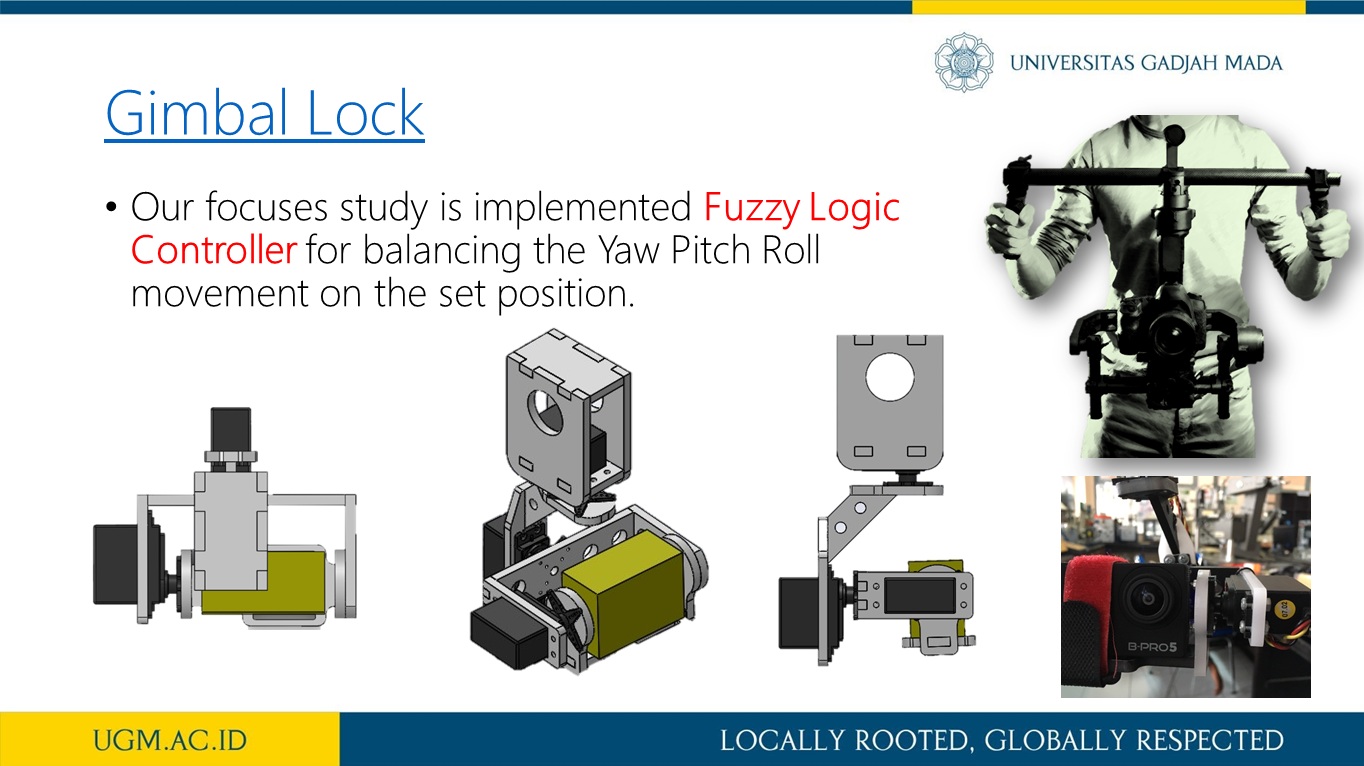
Pada penelitian ini memaparkan perancangan sistem penstabil kamera (gimbal) untuk mengurangi getaran maupun gerakan yang akan mengganggu kamera saat pengambilan gambar foto dan video. Sistem gimbal ini sangat penting digunakan dalam dunia fotografi dan videografi. Sistem gimbal yang dirancang pada penelitian ini adalah dengan tiga buah joint pergerakan yaitu roll, pitch, yaw (RPY). Sensor orientasi yang digunakan pada rancangan sistem gimbal ini menggunakan sensor inertia measurement unit (IMU) MPU 6050 dengan Kalman filter (KF) sebagai pengkondisi pembacaan sudut RPY. Untuk memperoleh hasil gambar yang baik pada sistem gimbal diperlukan suatu kendali, sehingga pada penelitian ini dikembangkan suatu kendali logika fuzzy yang diimplementasikan dalam sebuah mikrokontroller untuk menggerakan aktuator gimbal. Sistem aktuator pada rancangan gimbal menggunakan motorservo. Nilai setpoint sudut gimbal yang diberikan merupakan sudut elevasi gimbal terhadap tiga sumbu sudut RPY. Selanjutnya, nilai keluaran pembacaan sensor IMU dibandingkan dengan nilai setpoint pada masing-masing sumbu. Setelah itu, nilai kesalahan (error) dan nilai perubahan kesalahan (delta errror) yang didapat akan digunakan sebagai nilai masukan logika fuzzy. Terdapat tiga buah loop tertutup pada kendali logika fuzzy untuk masing-masing sudut RPY. Hubungan relasi masukan fuzzy diselesaikan menggunakan aturan Mamdani dan keluaran dari logika fuzzy diselesaikan dengan menggunakan metode weight average (WA). Dari hasil pengujian diketahui bahwa kendali logika fuzzy yang diimplementasikan pada sistem gimbal mampu mengurangi efek getaran sehingga diperoleh gambar yang baik dan tidak blur.


informasi lebih lanjut, silakan lihat publikasi kami di sini.
Kendali Logika Fuzzy pada Sistem Electronic Control Unit (ECU) Air Conditioner Mobil
Abstrak
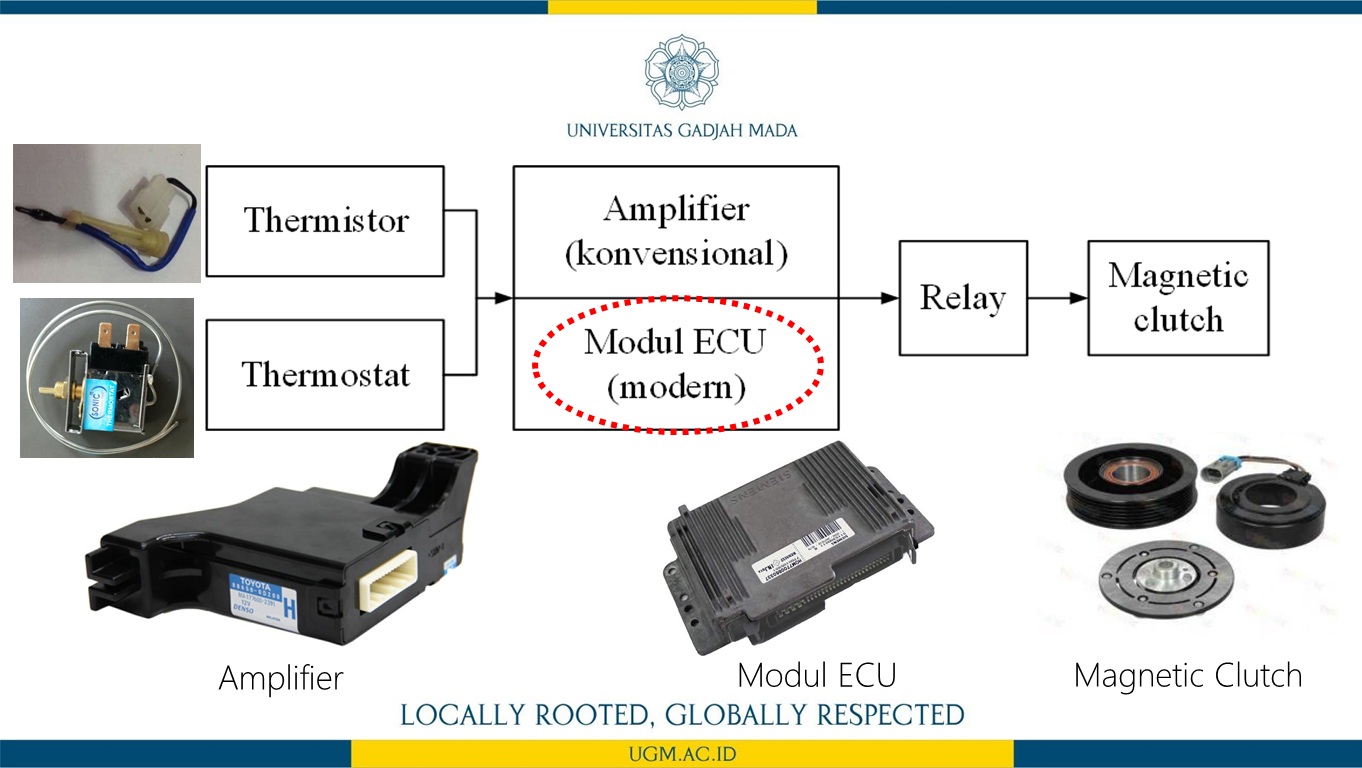
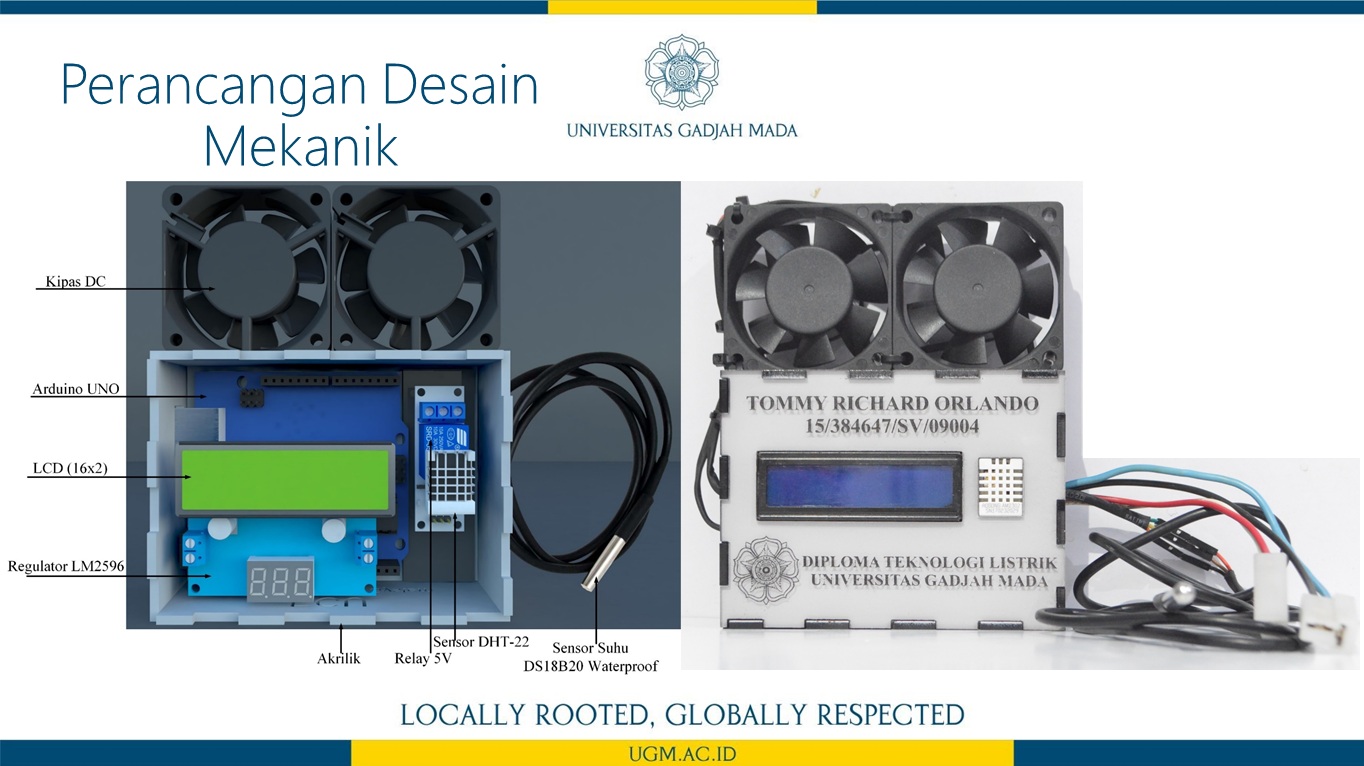
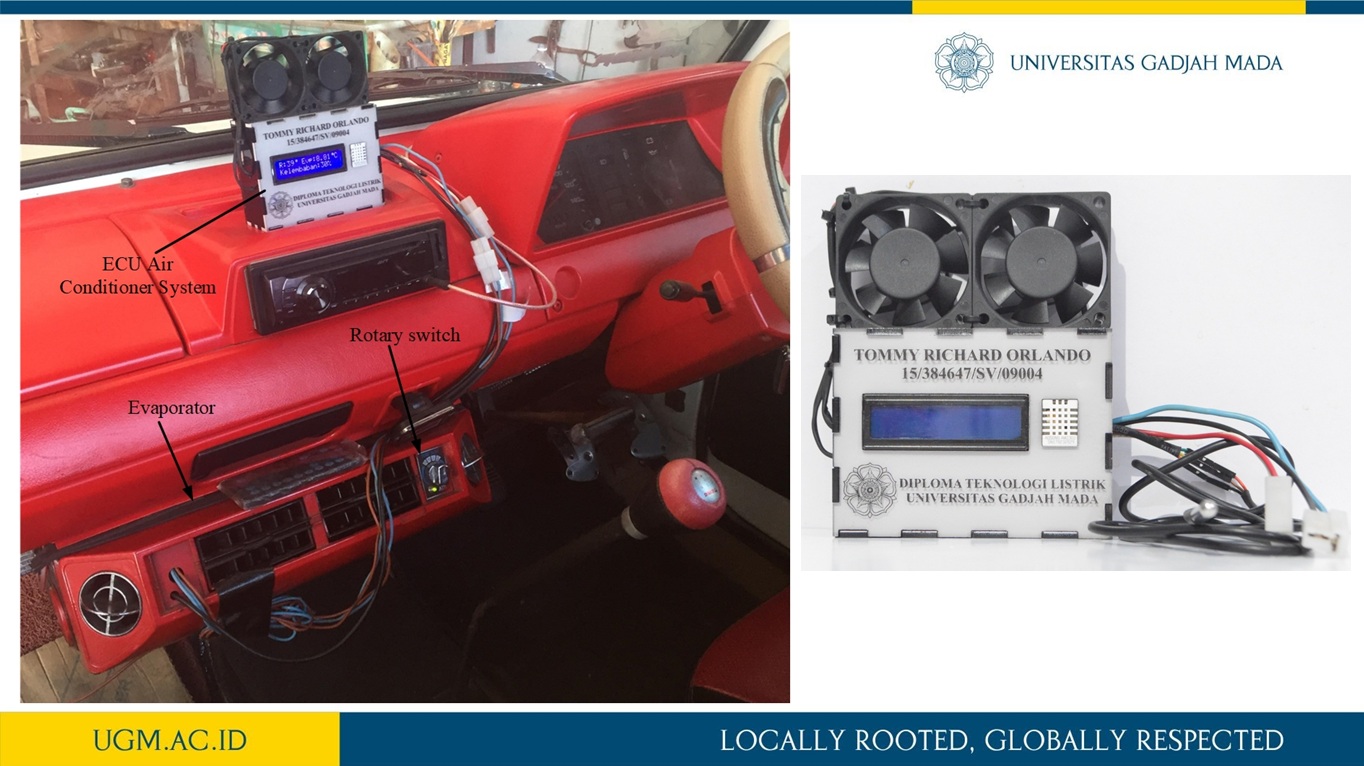
Penelitian ini memaparkan perancangan kendali logika fuzzy pada sistem electronic control unit (ECU) air conditioner mobil. Salah satu kendala pada ECU mobil adalah kerusakan pada sistem air conditioner. Bila ini terjadi umumnya pengguna mobil mengganti sistem ECU secara keseluruhan. Namun pada makalah ini, penulis meracang sistem ECU yang secara khusus digunakan untuk sistem air conditioner mobil. Sistem yang dirancang menggunakan sensor DS18B20 waterproof untuk mendeteksi suhu evaporator mobil. Selanjutnya, nilai suhu tersebut digunakan sebagai masukan logika fuzzy yang terdiri dari pembacaan suhu sekarang dan suhu terakhir dalam mengatur kecepatan putar kipas motor DC atau fan exhaustingdan waktu switching magnetic clutch compressor menyala. Hubungan relasi masukan fuzzy diselesaikan dengan aturan Mamdani dan keluaran dari logika fuzzy diselesaikan dengan metode weight average (WA). Dari hasil pengujian diperoleh bahwa kendali logika fuzzy yang diaplikasikan pada rancangan sistem air conditioner mampu mengendalikan kecepatan fan exhausting secara halus dan responsif.


informasi lebih lanjut, silakan lihat publikasi kami di sini.
Recent Comments