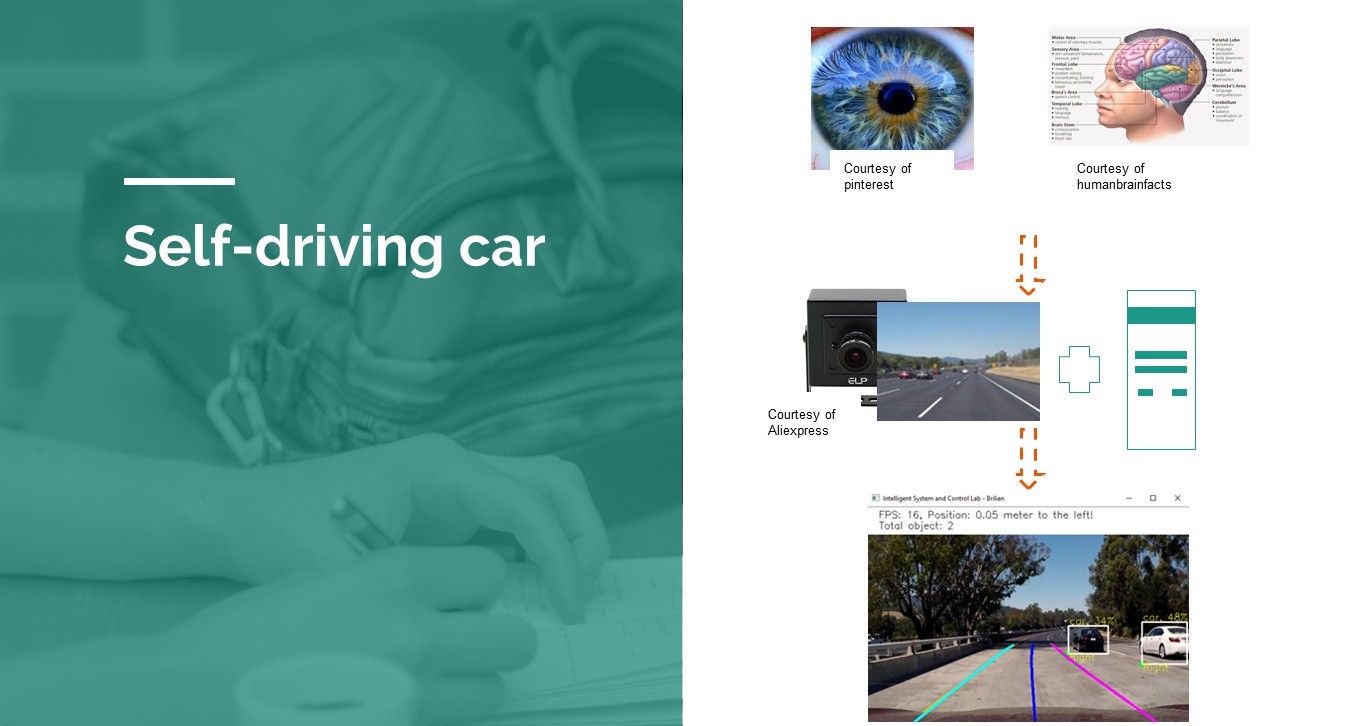
Towards self-driving car using convolutional neural network and road lane detector
Abstract
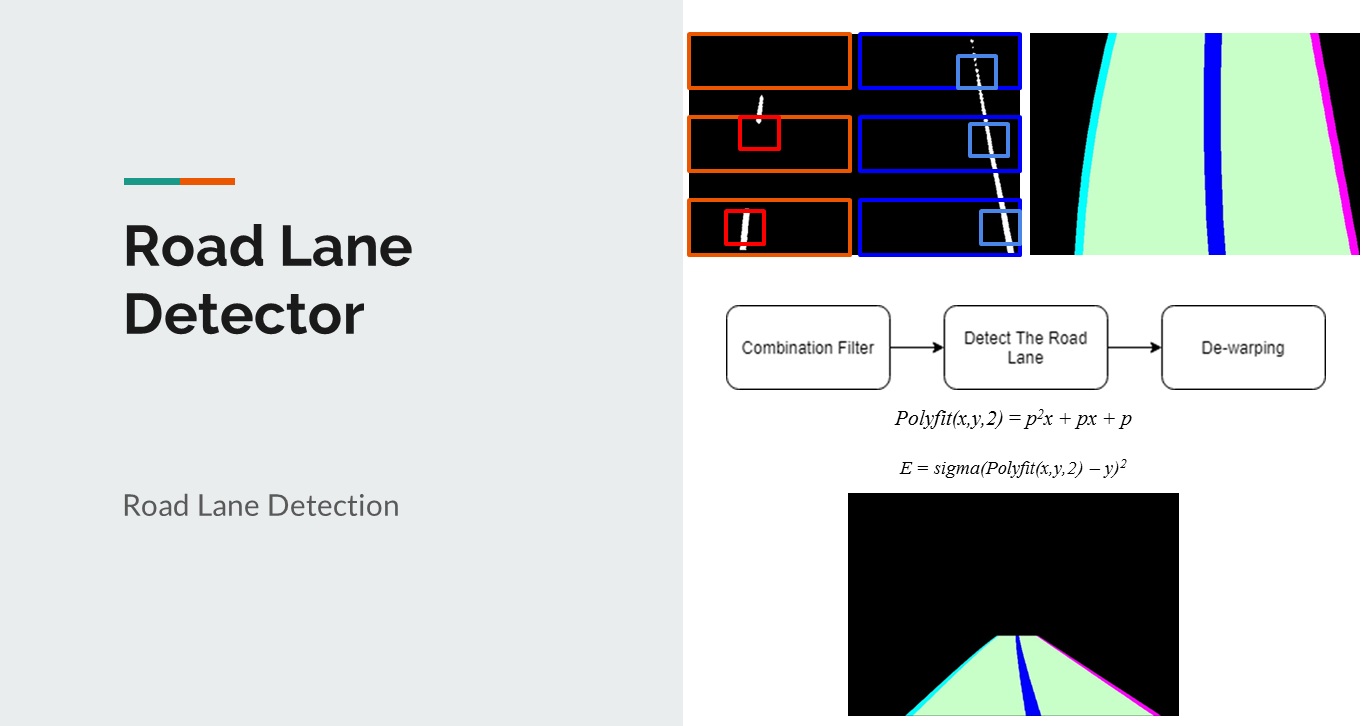
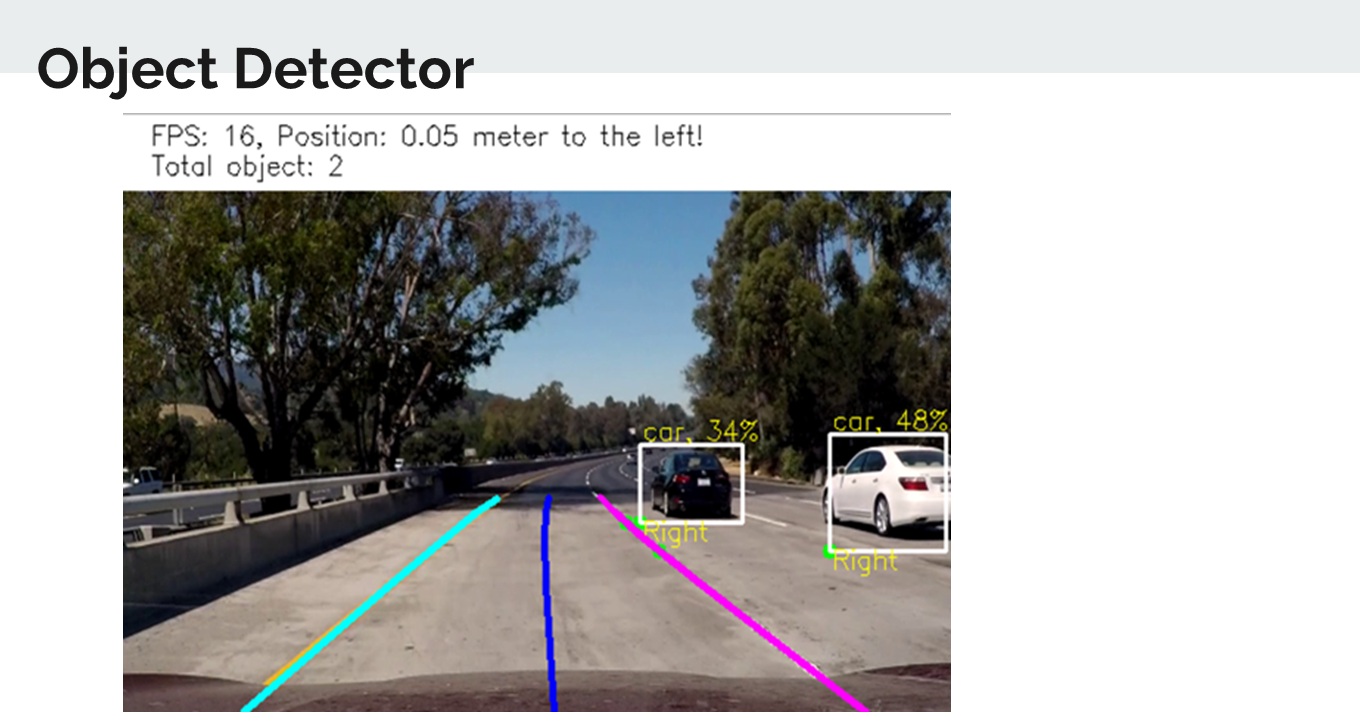
The advancement of Computer Vision these days has grown up beyond imagination. Recently, many researchers and tech companies are competing to develop self-driving car using either traditional or deep learning approach. YOLO (You Only Look Once) is one of the real-time CNN methods that aims to detect objects from images. On the other hand, Road Lane Detector is used to detect road track from video’s frames and to provide additional information that can be helpful for the decision-making process of the self-driving car. In this paper, we use YOLO as the object detector and polynomial regression as the road guidance in the real-world driving video simulations. We use NVIDIA GTX 1070 with 8 GB of RAM for the computations. The result shows a matching pair between those two methods for self-driving car environment and road lane guidance.
more detail visit our publication here
Recent Comments