VoBiRo – Vocational Bipedal Robot Platform, Kinematic and Locomotion Control
Abstract
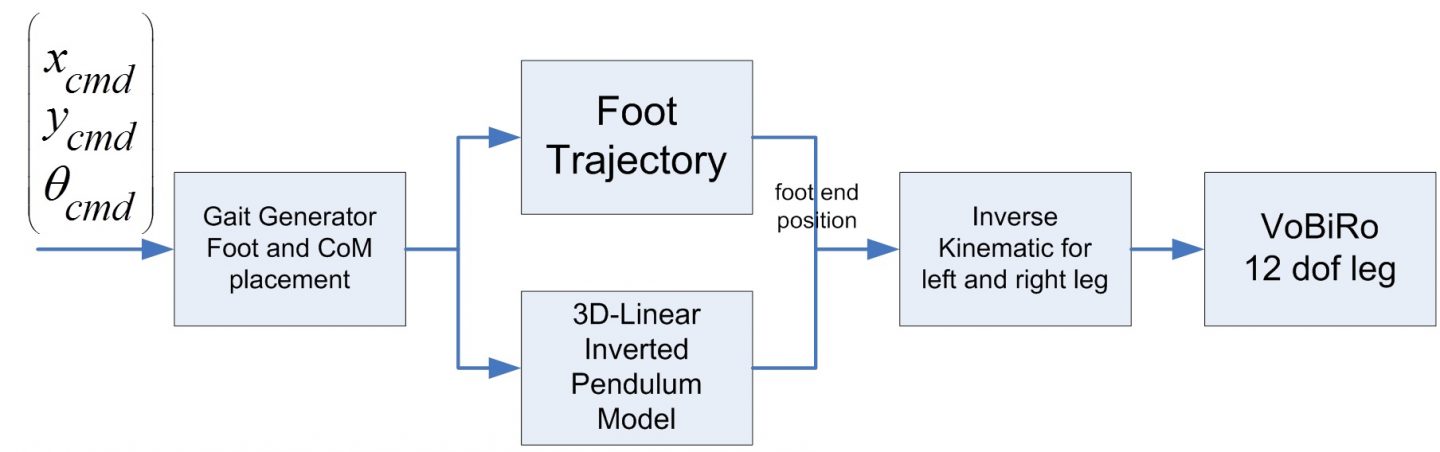
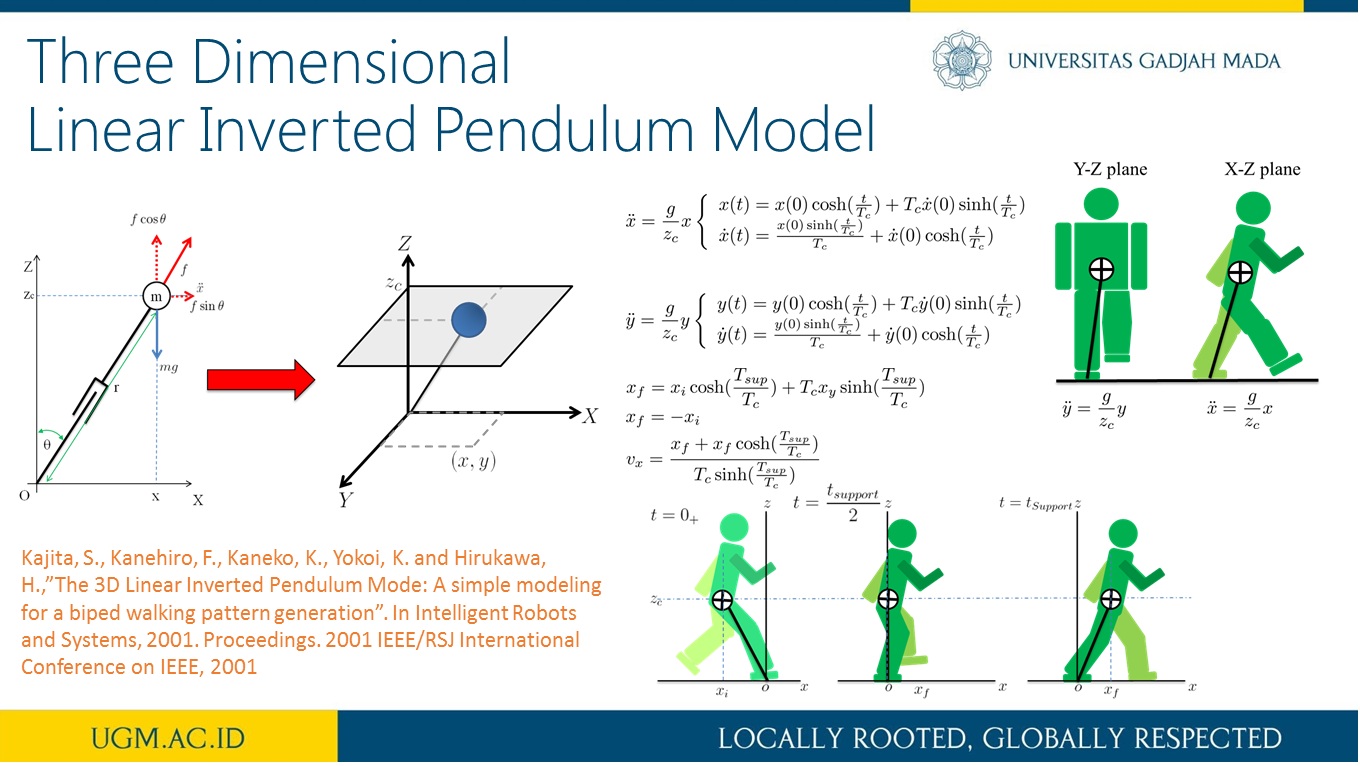
This research presents kinematic and locomotion control of vocational bipedal robot (VoBiRo)with a kid-size platform. Typically, a linear inverted pendulum model (LIPM) can be used to generate the center of mass (CoM) trajectory of a bipedal robot. By combining the swing foot trajectory, the omnidirectional walking command is capable of generating joint angle control commands in terms of kinematic. Thus, this paper proposes kinematic and LIPM as a locomotion control VoBiRo. A complete simulation was then implemented in MATLAB and graphical user interface (GUI) by Processing IDE relying on kinematic and LIPM model.

Locomotion Control of Bipedal Robot
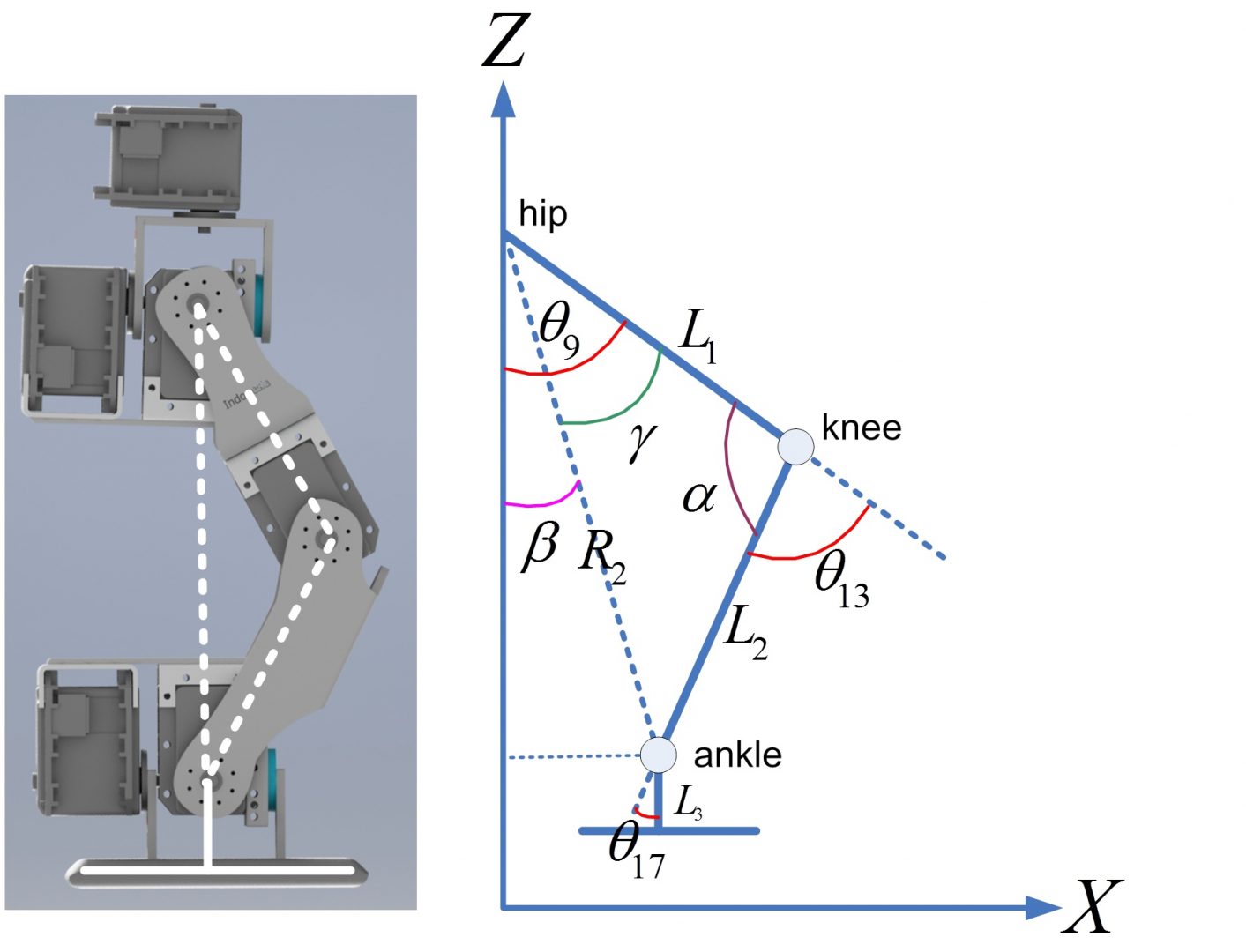
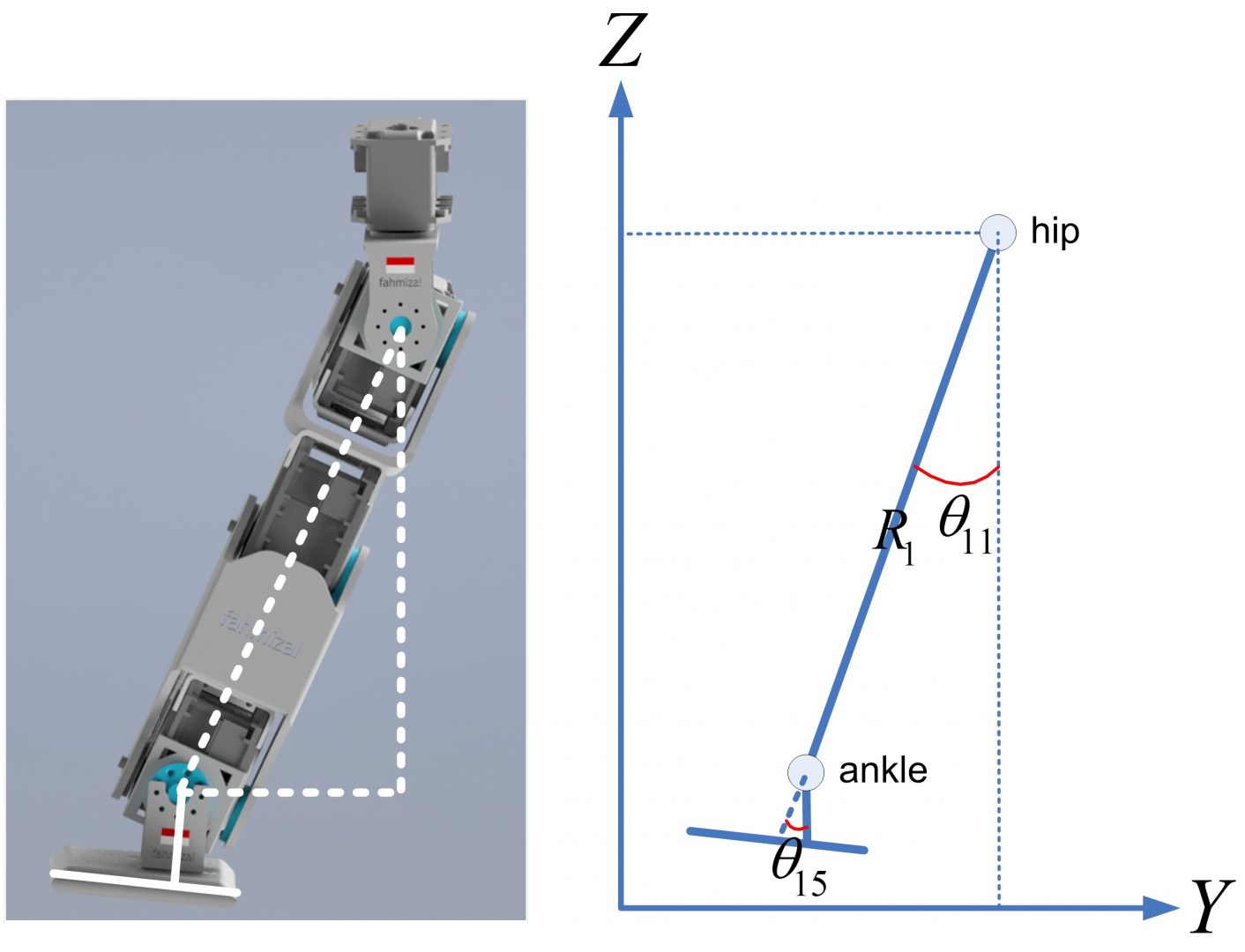
Inverse Kinematic
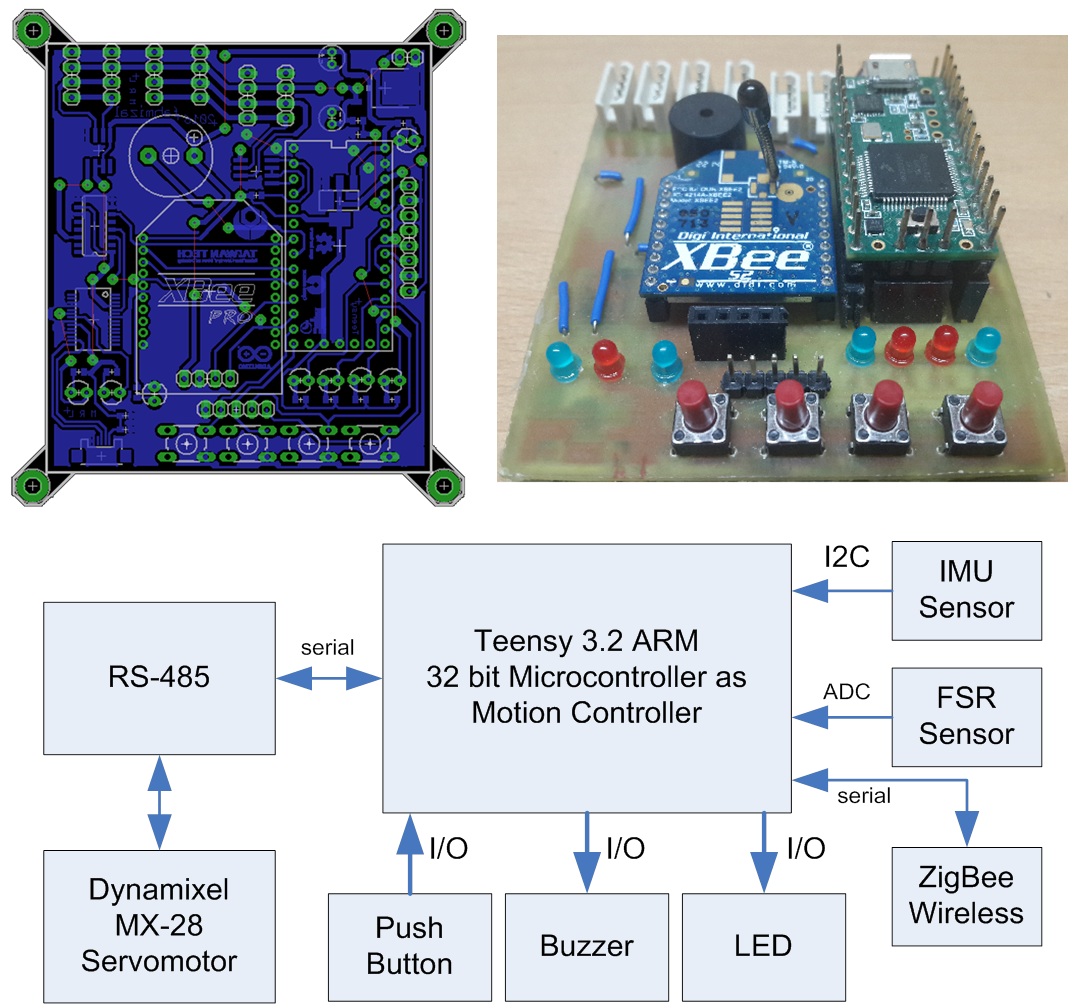
Electronic design of VoBiRo
Locomotion Control of Bipedal Robot
3D View Locomotion of VoBiRo

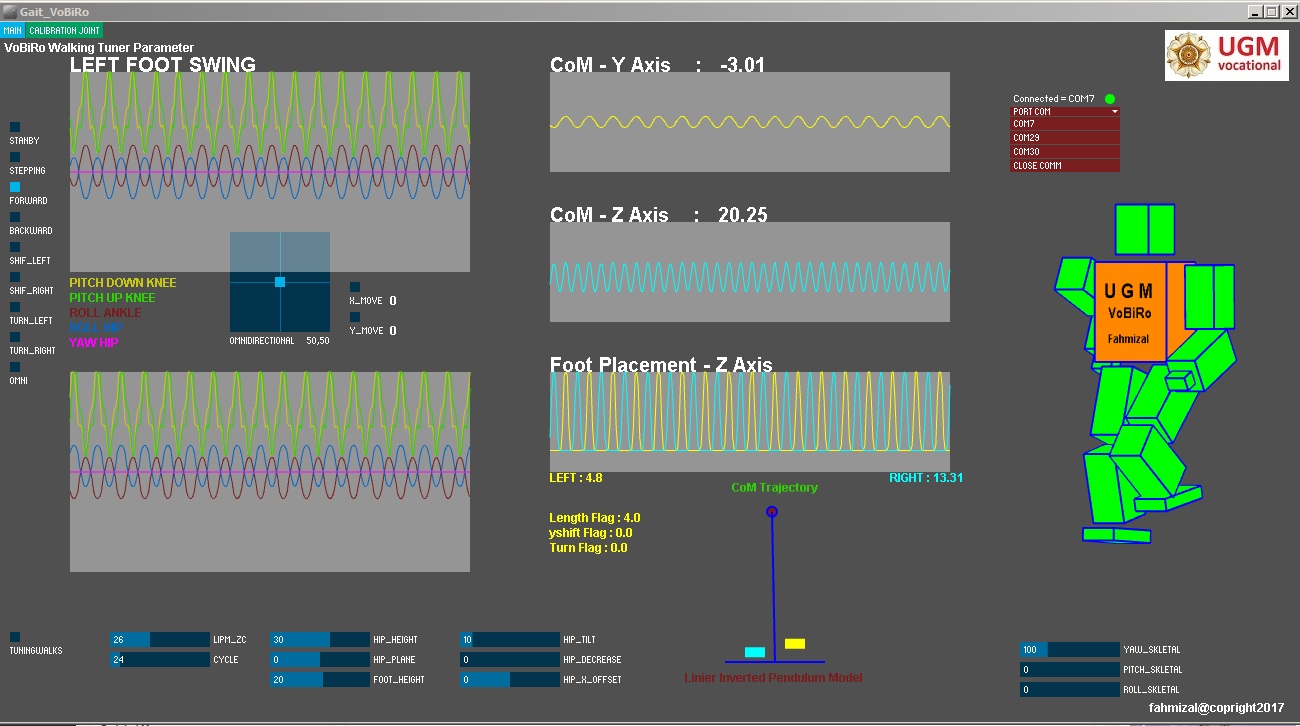
Graphical User Interface (GUI) of VoBiRo
more detail visit our publication here and our ppt
Recent Comments