Kendali Heading pada Trajectory Tracking Miniatur Robot Mobil
Abstrak
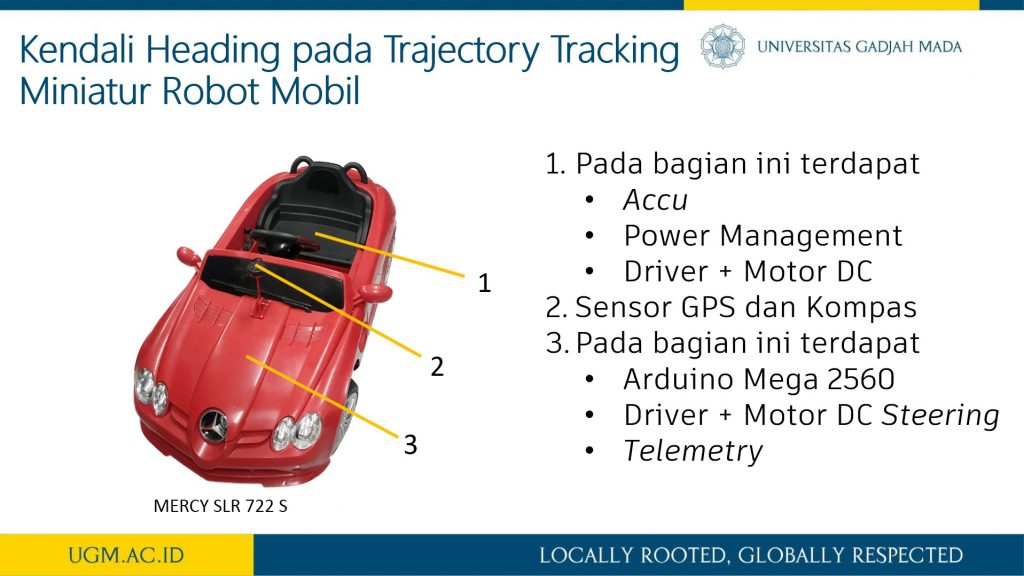
Penelitian ini membahas kendali heading pada trajectory tracking menggunakan sensor kompas dan global positioning sensor (GPS) pada miniatur robot mobil. Permasalahan yang timbul ketika miniatur robot mobil mengikuti lintasan ialah terjadinya slip pada roda. Oleh sebab itu menimbulkan kesalahan heading yang dapat diperoleh dari sensor kompas dan pembacaan posisi dari GPS pada miniatur robot mobil tersebut. Untuk meminimalisir permasalahan yang terjadi, kendali proporsional integral derivatif (PID) diterapkan untuk mengendalikan heading miniatur robot mobil dengan menggunakan metode ke-2 Ziegler Nichols. Dalam proses pencarian parameter dari kendali PID ini diperoleh dengan hasil Kp=0.6; Ti=2.5; dan Td=0.625. Selanjutnya, penerapan metode Haversine digunakan untuk menghitung jarak terpendek antara dua titik lintasan saat proses pembacaan posisi dari GPS. Dari hasil pengujian diperoleh bahwa kendali PID dan metode Haversine mampu membuat pergerakan miniatur robot mobil sukses mengikuti lintasan uji.



[embedyt] https://www.youtube.com/watch?v=kiDGoK4uaWI[/embedyt]
informasi lebih lanjut, silakan lihat publikasi kami di sini.
Recent Comments