
Automatic table writer merupakan sebuah robot yang dapat digunakan untuk menulis. Struktur robot ini terdiri dari dua lengan yang digabungkan untuk memegang pensil lalu dibawahnya terdapat tiga servo untuk alat geraknya. Automatic table writter digerakkan oleh servo yang diberi arus oleh LI-Po battery dan di kontrol oleh Arduino Nano. Komponen yang ada di dalam Automatic table writer ini, yaitu:
- Arduino Nano
Arduino Nano sebagai chipset yang sepaket dengan ATMEGA32, merupakan mikrokontroller yang digunakan sebagai otak atau controller yang menyimpan data dan mengirim sinyal menuju motor driver sebelum di eksekusi. Arduino Nano ini memiliki bentuk yang kecil dan ergonomis serta ekonomis. Dengan fungsinya yang sangat penting dan merupakan otak dari robot yang kami buat. - LiPo Battery 3s 11.1V
Sebagai power source yang berguna untuk menggerakan servo dan membangkitkan power menuju Arduino. Kelebihan menggunakan baterai LiPo ini karena mudah dan awet serta compatible terhadap alat yang menggunakan fungsi mikrokontroller. Selain itu, baterai LiPo ini dapat diisi ulang. - Regulator
Sebagai regulasi tegangan yang digunakan untuk men step down kan tegangan yang dikirim oleh battery agar dapat diterima oleh Arduino. Karena Arduino membutuhkan tegangan input sebesar 5V dan mengeluarkan Output kurang lebih sama 5V, maka tegangan baterai yang tadinya sebesar 11.1V di-Step Down-kan menggunakan Regulator ini. - Motor Servo 5 volt
Sebagai actuator yang menerima perintah dan bergerak sesuai perintah atau program yang diberikan oleh ATMEGA32. Motor servo ini memiliki torsi dan derajat putaran yang halus dan dapat di program oleh IDE, sehingga kami memilih motor ini sebagai actuator yang menggerakan lengan Automatic Table Writer.
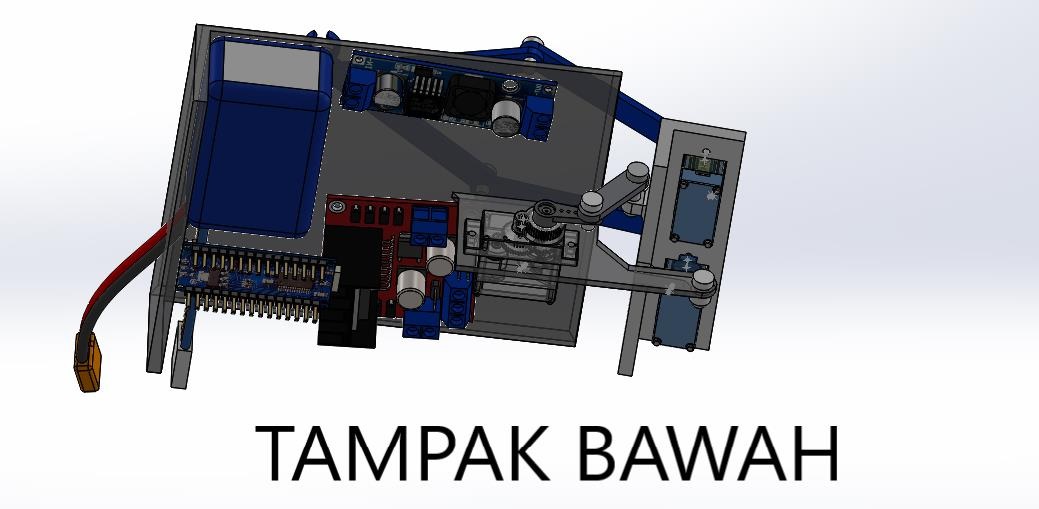
Desain dari Automatic table writer:

Ringkasan Cara Kerja Alat
Pertama, program dibuat dari Arduino IDE dan di transfer menuju Arduino Nano untuk di process dan datanya di olah di Chipset ATMEGA. Kemudian program tersebut dapat diaktifkan ketika push button di nyalakan dan terhubung dengan battery yang mengirim tegangan sebesar 11.1V. Tegangan tersebut dialirkan menuju Regulator dan di stepdown menjadi 5V sesuai dengan kebutuhan yang dibutuhkan Arduino Nano untuk memproses data. Lalu program tersebut ditransfer menuju servo motor dan merubahnya menjadi sebuah energi mekanik yang bergerak dengan torsi sesuai dengan yang telah diprogram.
Recent Comments