Altitude control of quadrotor using fuzzy self tuning PID controller
Abstract
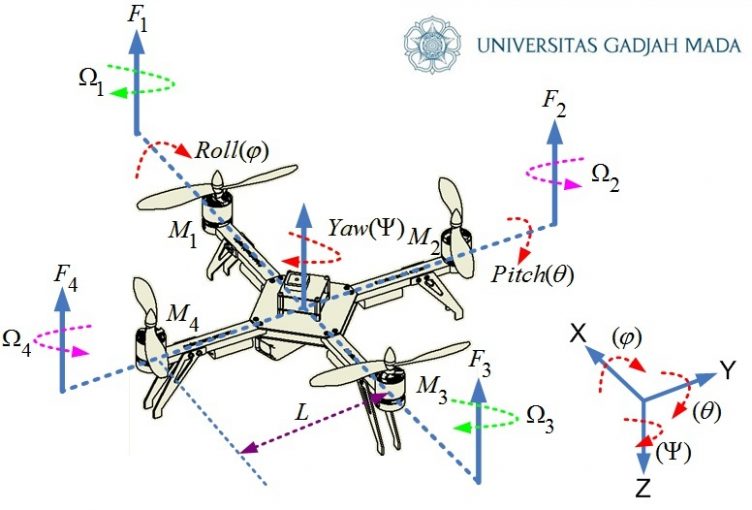
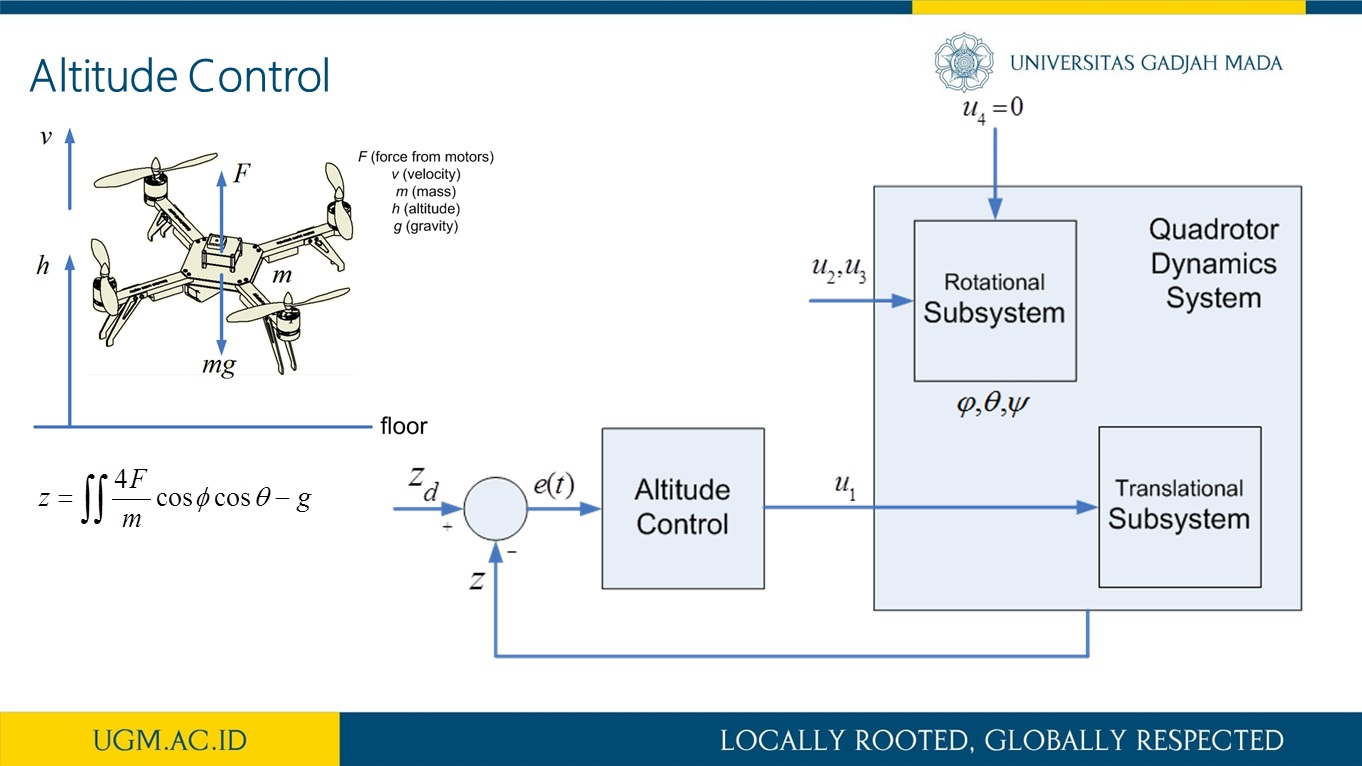
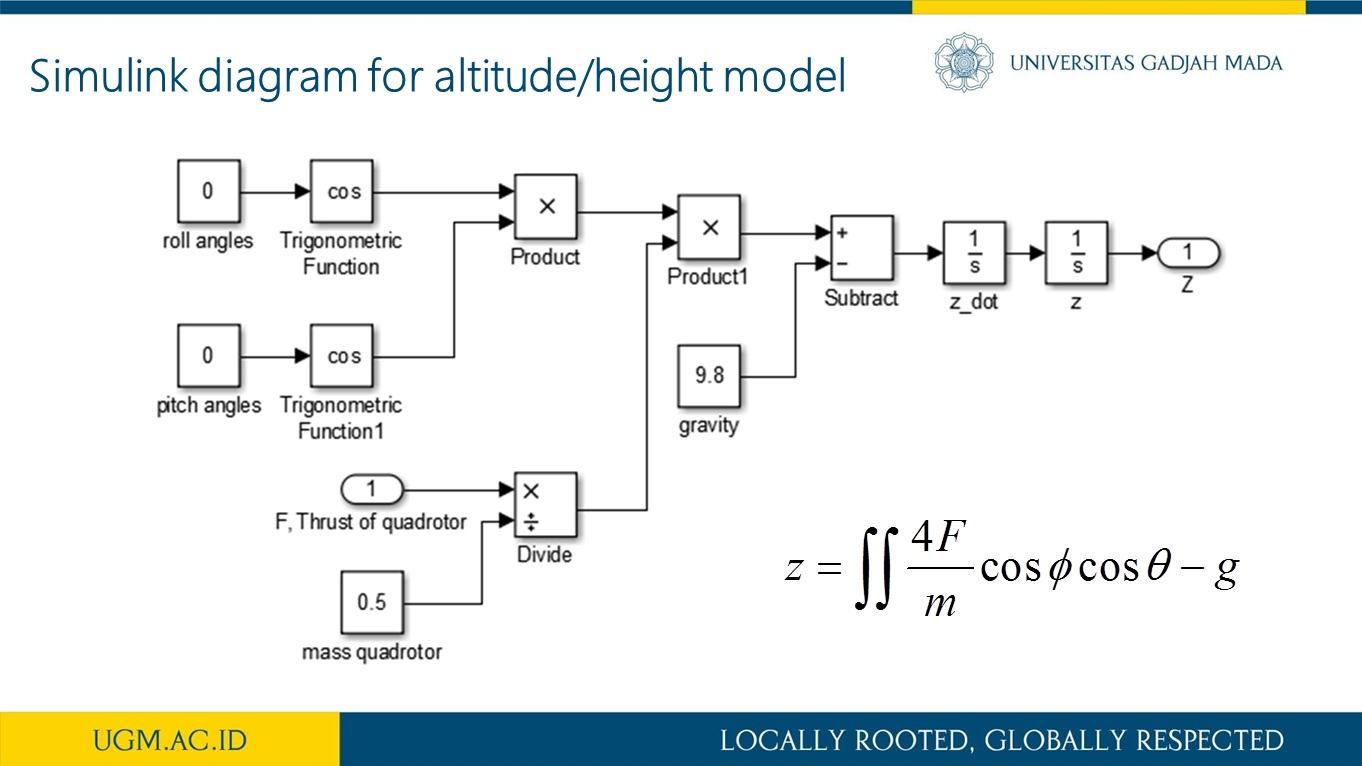
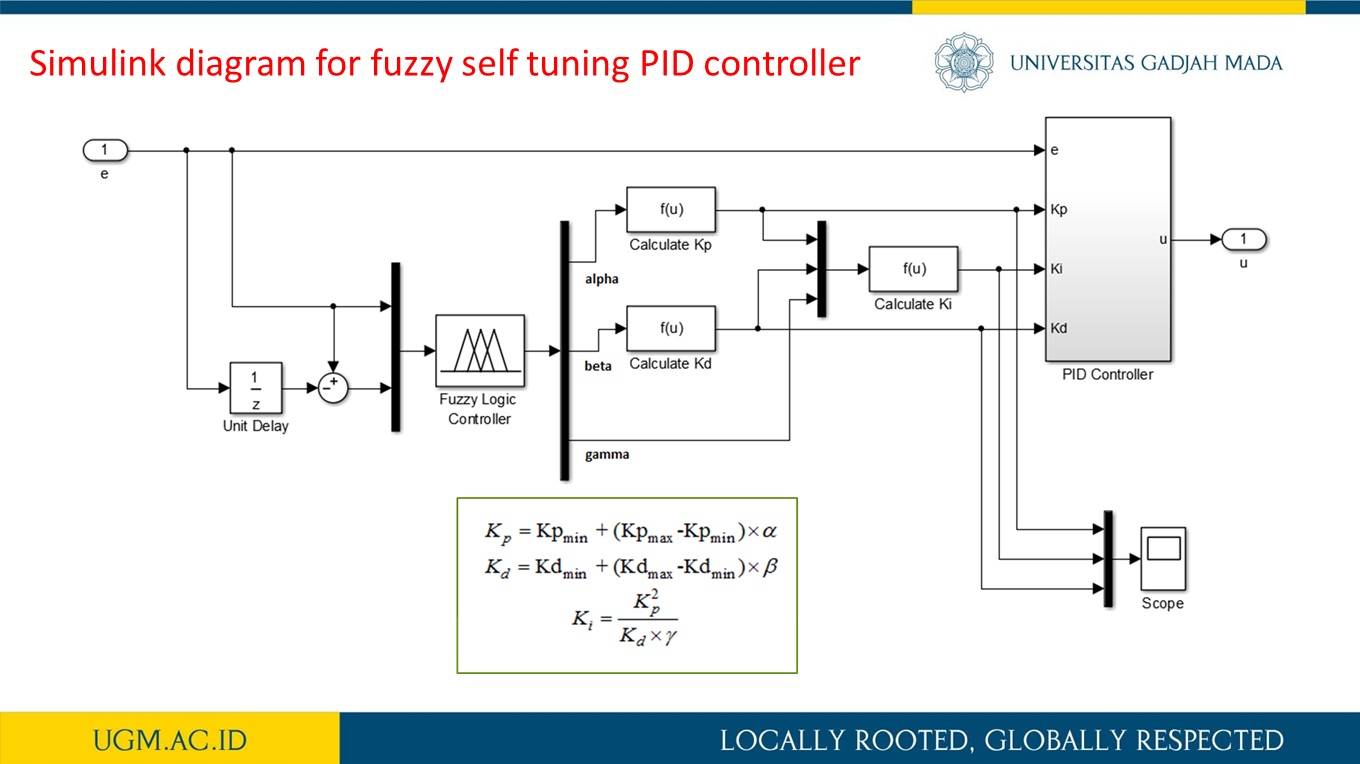
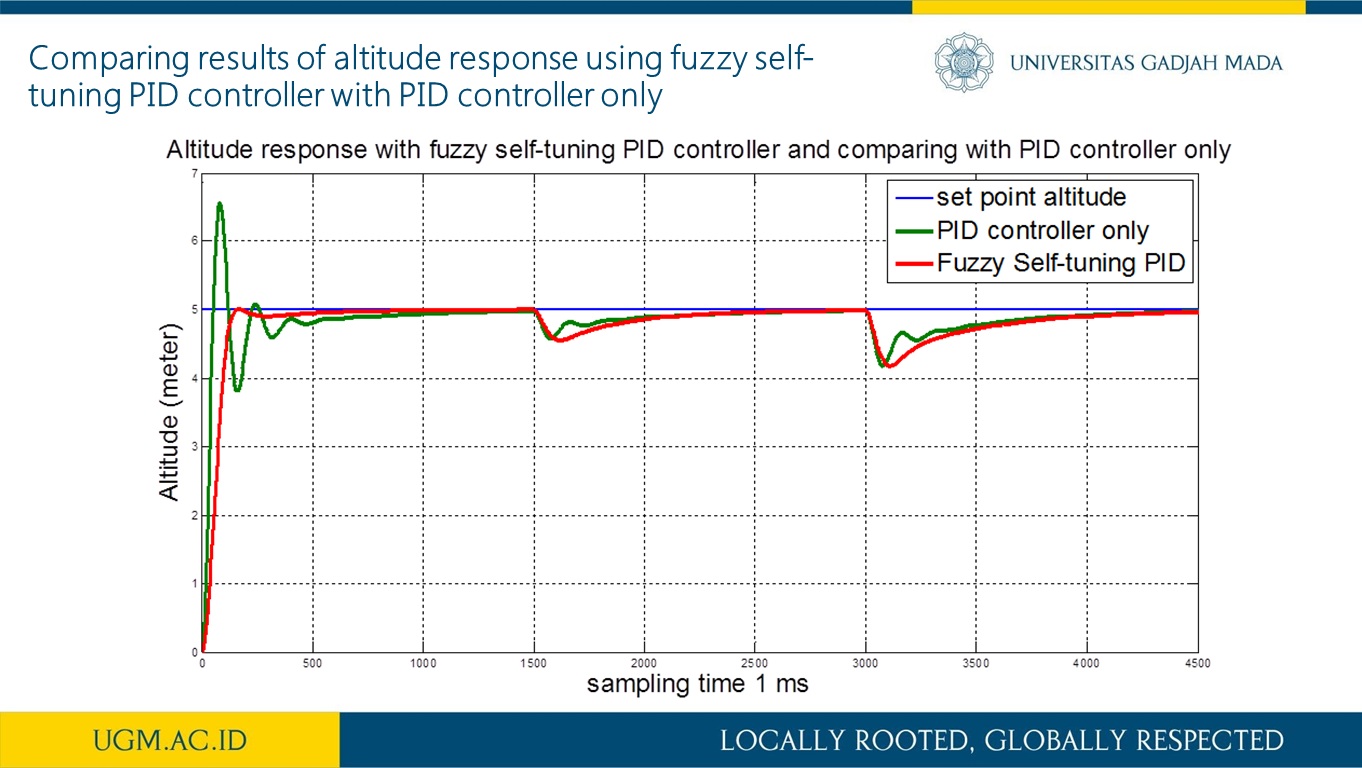
This research presents fuzzy self-tuning PID controller for controlling the altitude of the quadrotor. Although the PID controllers have many advantages, it has a limitation that the main term gains called proportional gain, integration gain, and derivative gain have to be tuned manually. One of a solution to manage its limitation is adding the special feature called self-tuning. So, a fuzzy self-tuning PID controller is proposed to adjust the gain parameter of PID controller. As a result, two control techniques were then developed and synthesized for comparing; a linear PID controller only and fuzzy self-tuning PID controller. A complete simulation was then implemented on MATLAB/Simulink relying on the derived mathematical model of the quadrotor.
more detail visit our publication here.
Rigorous Modelling Steps on Roll Movement of Balancing Bicopter using Multi-level Periodic Perturbation Signals
Abstract
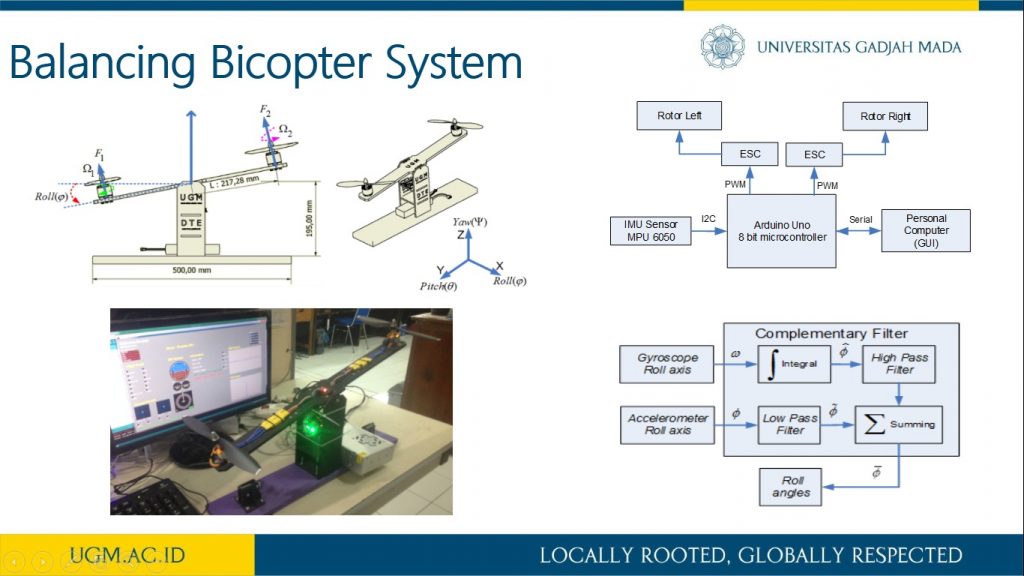
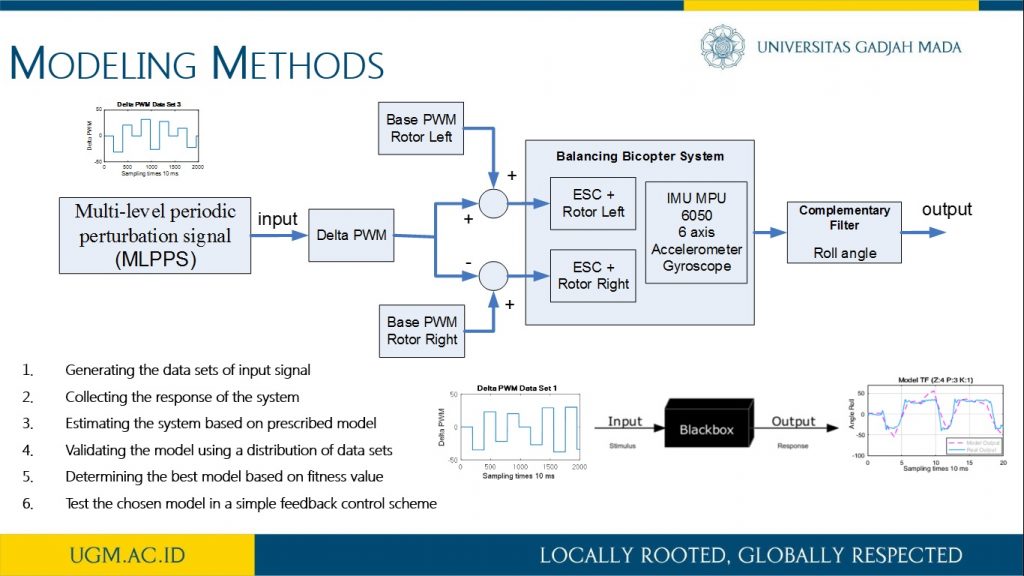
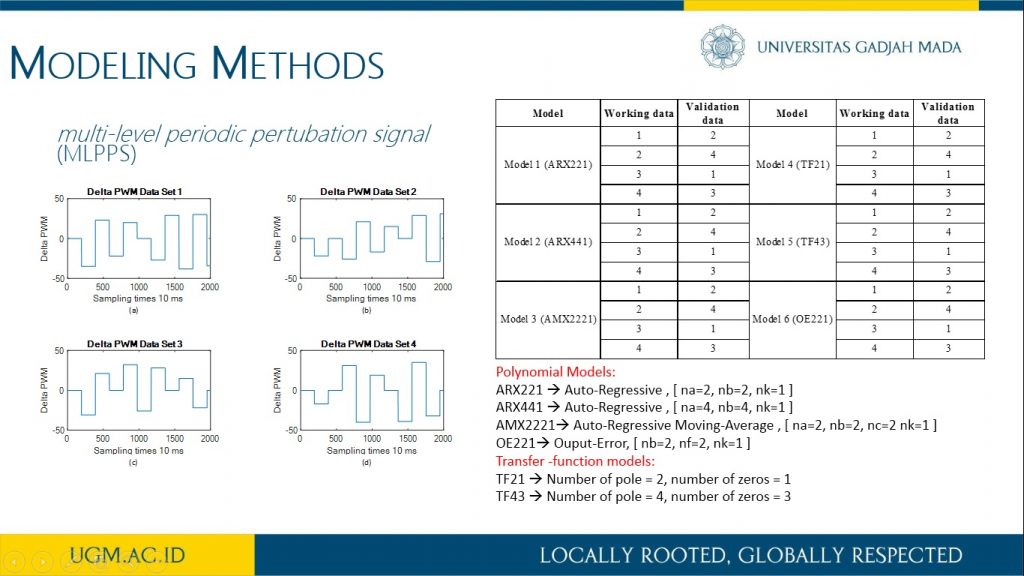
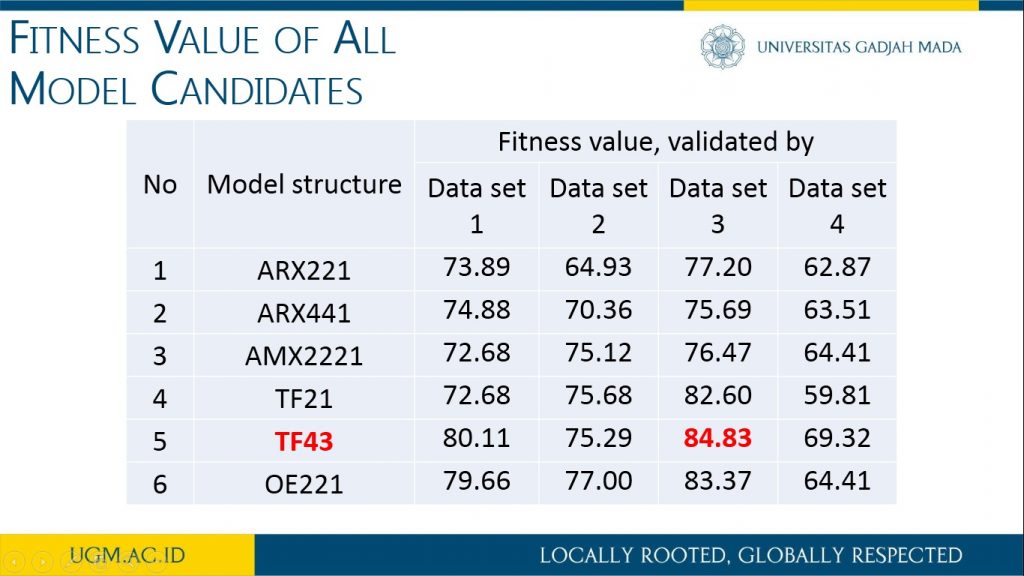
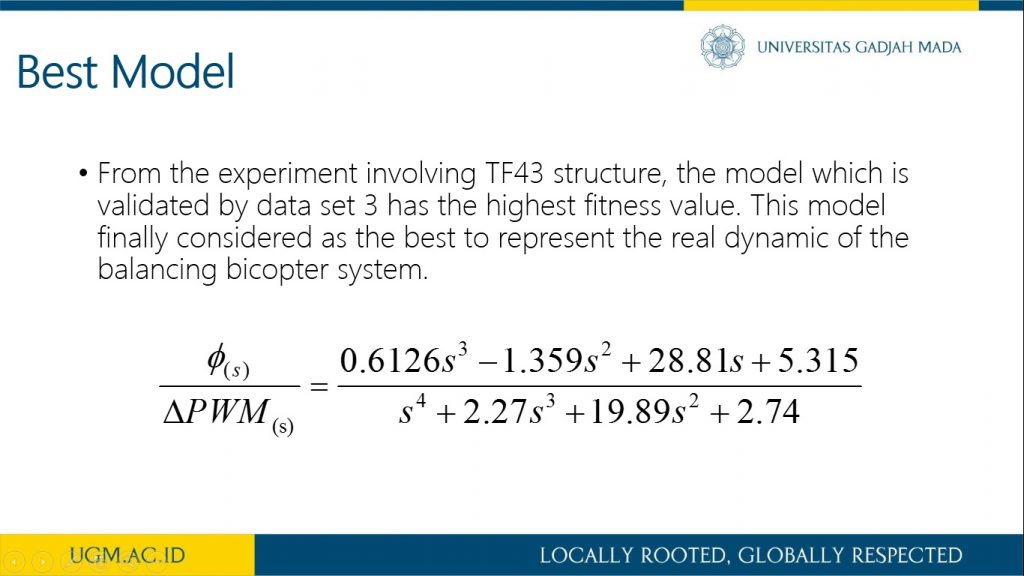
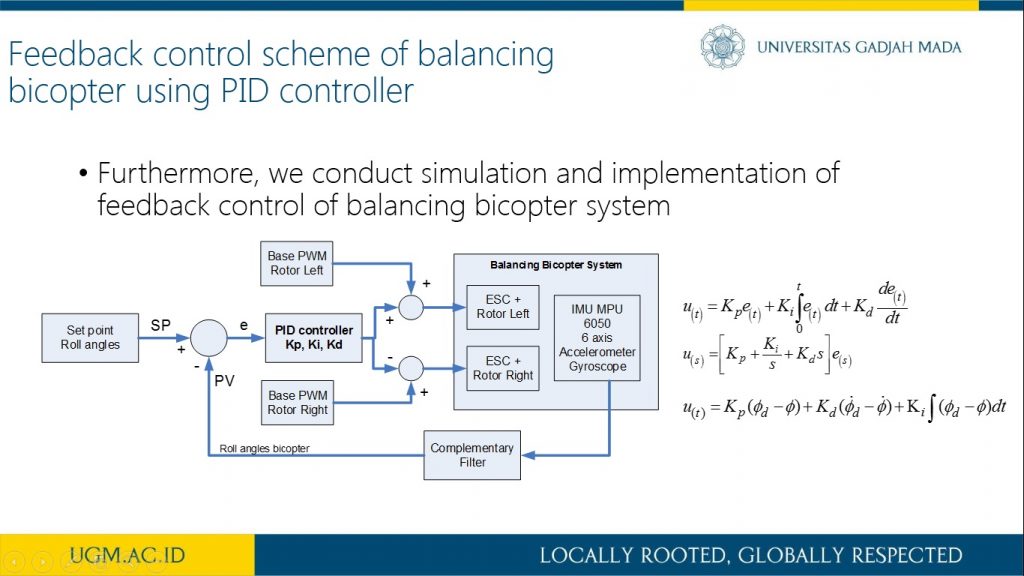
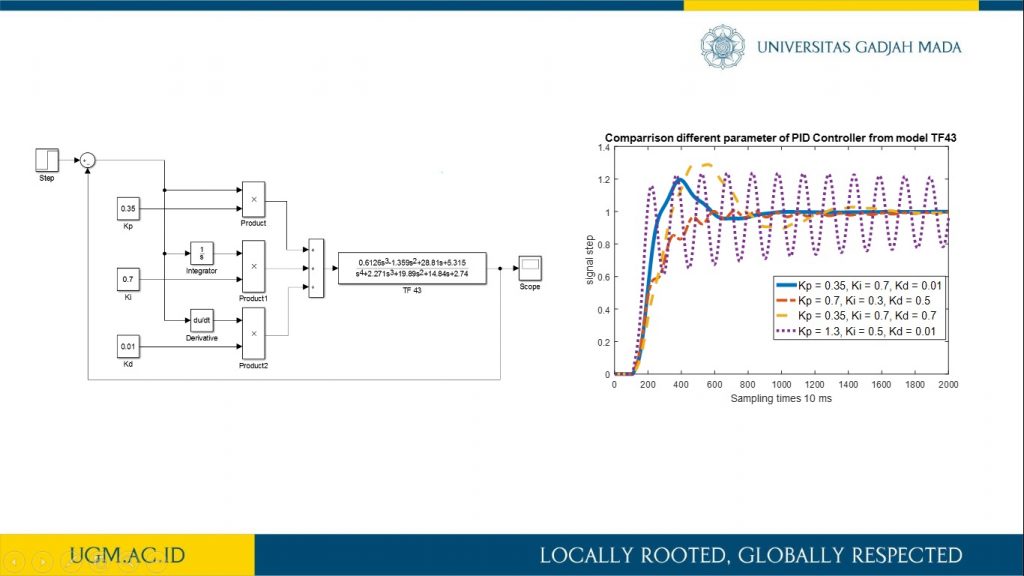
This research presents the modelling steps of balancing bicopter for its roll movement in a rigorous way. This research uses delta speed between two rotors as an input while the roll angle obtained from an inertial measurement unit (IMU) sensor after refined by a complementary filter (CF) considered as an output. The single input and single output (SISO) data are used to build a model. Multi-level periodic perturbation signal (MLPPS) treated as an input signal for the identification process to provide a good model which is indicated by fitness value. A particular cross-distribution of MLPPS data sets is used in the validation process to earn the best model. Furthermore, a simple feedback control scheme is used to re-examine the model with the real system. The result declares that by using MLPPS, simulation of the model conducted in MATLAB Simulink gives a close performance to the measured real experiment which is implemented using Arduino Uno.
more detail visit our publication here.
Recent Comments