UV Disinfection Mobile Robot from Otomasi SV UGM
Penelitian menyebutkan bahwa sinar UV dapat membunuh bakteri dan mencegah mikroorganisme untuk berkembangbiak. Menurut penelitian yang dilakukan di Columbia University Medical Center, Amerika Serikat, pada peneliti tersebut menemukan fakta bahwa sinar ultraviolet (UV) dapat mencegah penyebaran virus di tempat umum. Sinar ultraviolet dapat membunuh virus. Namun demikian, sinar ultraviolet tidaklah aman bagi manusia karena sinar ini dapat menyebabkan masalah kulit diantaranya kulit terlihat menjadi lebih tua dari umur aslinya, kulit menjadi berwarna merah seperti terbakar, kulit menjadi gelap, dan yang paling parah adalah merusak materi genetic pada sel-sel kulit sehingga menyebabkan kanker kulit. Ada manfaat yang didapat dari penggunaan sinar ultraviolet, ada juga risiko yang membahayakan manusia oleh pengunaan senar ultraviolet itu sendiri.
Dimasa pandemik ini proses sterilisasi sangatlah diperlukan sebagai langkah pencegahan untuk mengurangi penyebaran virus. Proses sterilisasi utamanya diperlukan di rumah sakit. Rumah sakit menjadi tempat dimana virus-virus banyak ditemui. Untuk menyediakan tempat yang aman bagi pasien dan dokter khususnya, proses sterilisasi ini diperlukan untuk setiap saat. Untuk menangani hal tersebut, Laboratorium Instrumentasi dan Kendali, Departemen Teknik Elektro dan Informatika, Sekolah Vokasi, Universitas Gadjah Mada mencoba membuat prototipe robot yang mana dapat membawa manfaat dari sinar ultraviolet tanpa membahayakan keberadaan manusia.
Desain robot ini dibuat tinggi dan ramping menyesuaikan lampu ultraviolet yang dipakai. Desain yang sederhana diharapkan mampu memotong biaya pembuatan robot ini sehinga mampu banyak diproduksi pada masa pandemik seperti ini. Desain robot dapat dilihat pada Gambar 1 dan Gambar 2 untuk ukuran dimensinya.
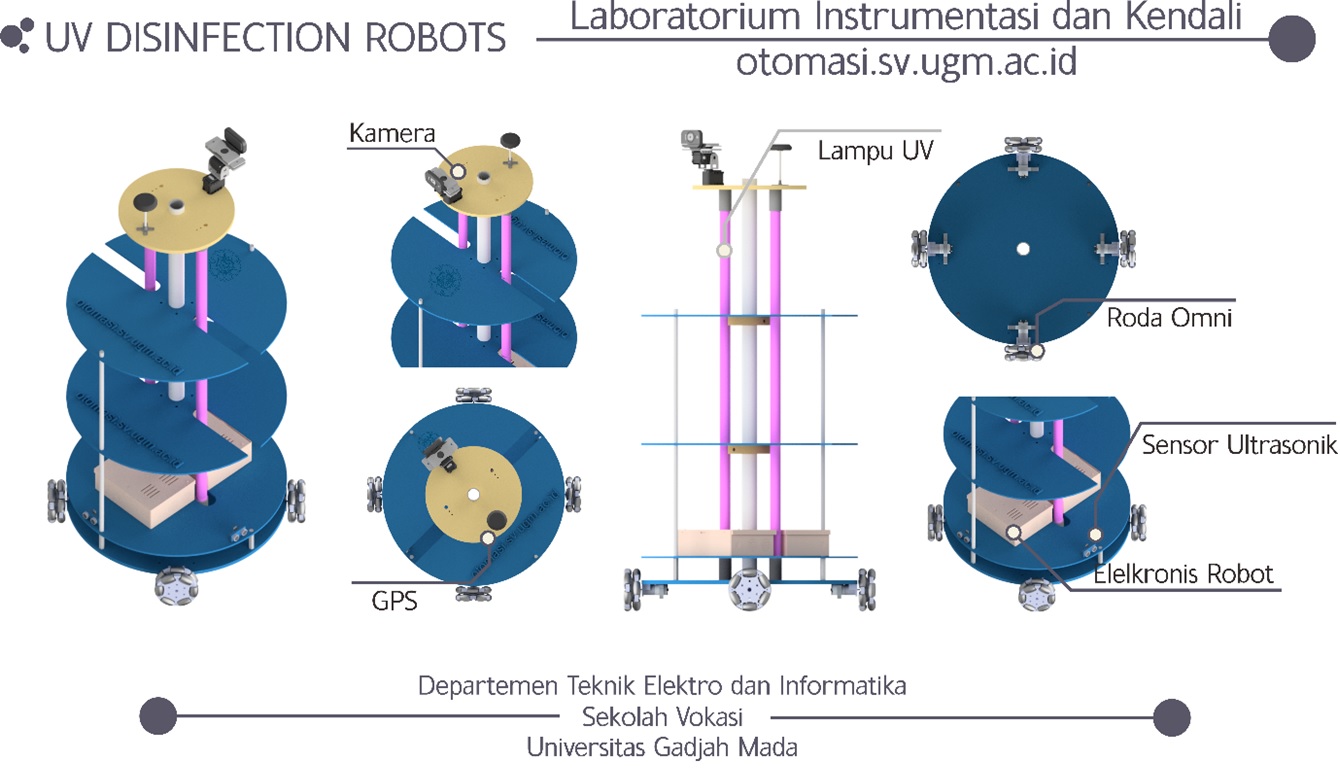
Gambar 1 Desain Mekanik Robot UV Disinfection Mobile Robot.

Gambar 2 Dimensi Robot UV Disinfection Mobile Robot.
Mobilitas yang luas sangat diperlukan mengingat robot ini terkadang harus bergerak di ruangan yang sempit, di ruangan yang sesak dan penuh dengan barang-barang. Untuk mengatasi hal tersebut, robot ini menggunakan roda omni sebagai penggeraknya. Robot dengan roda omni memungkinkan robot tersebut bermanuver menuju segala arah tanpa mengubah heading robot tersebut. Perubahan arah gerak robot disebabkan karena roda omni mempunyai bentuk roda yang berbeda dari biasanya. Perbedaan itu adalah pada setiap roda omni terdapat roda lagi didalamnya. Perbedaan sudut tersebut sebesar 90 derajat dengan roda utama omni.
Robot ini memiliki lima base yang mana semuanya itu berbentuk lingkaran. Base pertama berada pada paling bawah robot digunakan sebagai penopang roda dan penopang pilar utama robot dan dua lampu UV. Base ini mempunyai ketebalan sebesar 10mm. Base kedua merupakan tempat untuk meletakkan kotak elektronis robot dan sebagai tempat peletakan sensor ultrasonik. Base kedua dan ketiga sebagai penyangga dan penopang agar konstruksi robot semakin kokoh, dan base kelima sebagai tempat meletakkan kamera dan sensor Global Positioning Sensor (GPS). Robot ini dibekali dengan dua lampu UV yang memanjang dimana akan memancarkan sinar UV pada sekeliling robot.
Sistem elektronis robot yang dibuat ditunjukan seperti bagan pada Gambar 3. Robot ini membutuhkan sebuah kontroller sebagai otak dari robot itu sendiri. Teensy 3.5 dipilih sebagai mikrokontroller dikarenakan mempunyai beberapa keunggulan salah satunya adalah keunggulan dari chip yang dipakai oleh mikrokontroller itu sendiri yaitu chip ARM 32-bit yang mempunyai kinerja yang tinggi dan cepat. Selain mikrokontroller dibutuhkan empat buah motor DC dan empat buah driver motor DC yang mana digunakan sebagai penggerak dari roda omni. Pada bagian catu daya, digunakan tiga buah baterai LiPo dimana masing-masing mempunyai fungsi tersendiri. Baterai pertama digunakan sebagai penyuplai mikrokontroller, driver, dan sensor sensor yang digunakan. Baterai kedua digunakan untuk menyuplai servo Dynamixel AX-18 dan sistem kamera yaitu web kamera Logitech C525 dan Raspberry Pi 3. Baterai ketiga digunakan untuk menyuplai lampu UV dimana apabila lampu UV yang digunakan mempunyai masukan tegangan AC maka dibutuhkan sebuah inverter untuk mengubah tegangan DC dari baterai menjadi tegangan AC yang dibutuhkan oleh lampu UV.
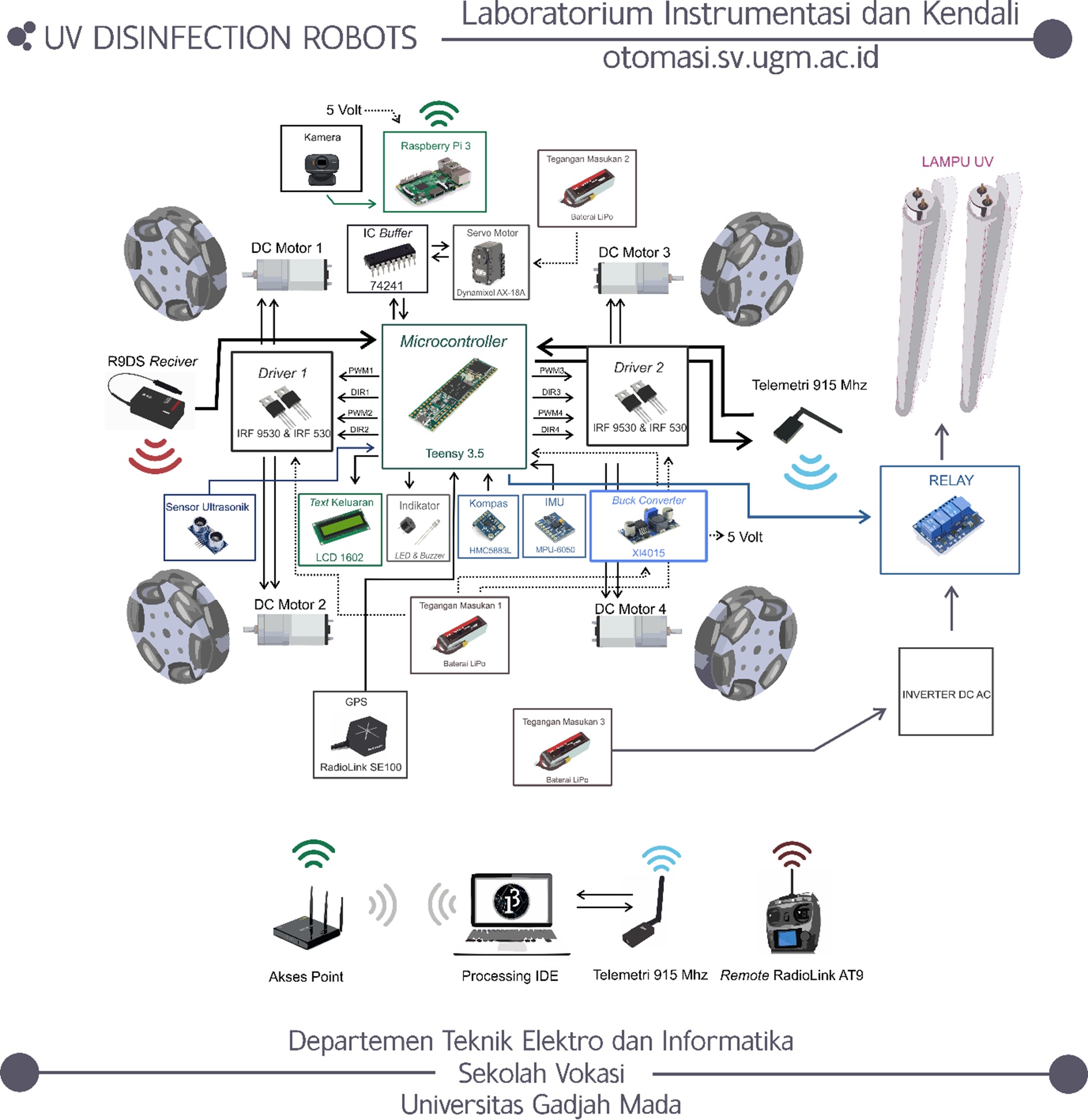
Gambar 3 Sistem elektronis UV Disinfection Mobile Robot.
Beberapa sensor digunakan pada robot ini diantaranya merupakan sensor kompas, sensor IMU, dan juga sensor GPS. Sensor- sensor tersebut dapat berguna untuk memantau kondisi robot mengingat robot dikendalikan secara jarak jauh. Sensor kompas digunakan untuk mengetahui pada arah mana robot itu menghadap. Sensor IMU digunakan untuk mengetahui attitude dari robot. Sensor GPS digunakan untuk mengetahui lokasi dari robot tersebut. Tidak kalah penting adalah penambahan sensor ultrasonik, sensor ini digunakan untuk obstacle avoidance (penghindar halangan). Pengaplikasiannya adalah supaya robot tidak terbentur oleh benda-benda disekitarnya terutama oleh dinding.
Sistem kontrol pada robot ini dapat dilakukan secara otomatis dan manual. Jika secara manual dapat langsung dikontrol oleh remote control yang tersedia, dimana data kontrol akan dikirimkan menuju robot secara wireless. Jika robot dikontrol secara otomatis maka robot secara mandiri akan melakukan scanning dan proses sterilisasi secara otomatis. Mode otomatis dapat digunakan jika ruangan yang akan disterilisasikan mempunyai ruang yang luas dan barang-barang yang tidak terlalu banyak. Mode manual di rekomendasikan jika ruangan memiliki ruang yang sempit dan sesak.
Untuk menjembatani antara user atau pengguna dengan robot, dibuatlah software aplikasi robot sehingga pengguna dapat mengontrol robot lebih baik. Software yang dibuat ini dibuat berupa antarmuka menggunakan Processing IDE. Software antarmuka yang dibuat ini menawarkan beberapa fitur. Fitur utama terletak pada kemampuan mengakses live streaming kamera yang berada pada bagian depan robot. Kamera yang dimiliki oleh robot ini memiliki dua derajat kebebasan dimana gerakan tersebut digerakan oleh servo Dynamixel AX-18 yang membuat kamera dapat berotasi secara vertical dan horizontal, dan posisi dan gerakan kamera tersebut dapat diatur melalui software antarmuka yang dibuat secara jarak jauh pula. Fitur yang lainnya adalah memvisualisasikan data sensor yang terbaca oleh robot sehingga mudah dipahami oleh pengguna.
Penggunaan robot ini tentunya harus mengunakan prosedur keamanan mengingat bahaya yang didapat dari sinar UV. Ruangan yang akan disterilkan harus bebas dari keberadaan manusia. Setelah ruangan bebas dari manusia, pengguna robot bisa menentukan mode pembersihan baik secara manual ataupun secara otomatis. Kondisi robot dapat dilihat dari software antarmuka. Software tersebut dapat menampilkan visualisasi seluruh data sensor dan dapat menampilkan live streaming vidio kamera robot yang juga dapat dikontrol. Setelah seluruh ruangan selesai di sterilisasi maka robot akan melakukan komputasi apakah seluruh ruangan benar-benar selesai di sterilkan. Jika sudah robot akan mengirimkan pesan notifikasi dimana ruangan telah disterilkan dan robot akan perlahan keluar dari ruangan.
Itulah prototipe robot UV Disinfection Mobile Robot dari Laboratorium Instrumentasi dan Kendali, Departemen Teknik Elektro dan Informatika, Sekolah Vokasi, Universitas Gadjah Mada. Desain prototipe ini diharapkan mampu membawa solusi dari masa-masa pandemik ini. Mengurangi angka penyebaran virus dan memutus penularan virus dengan membunuh virus itu sendiri dengan proses sterilisasi sehingga tempat yang dihuni menjadi tempat yang aman.
Recent Comments