Salah satu robot yang sering dijumpai di bidang industri adalah Robot SCARA ( Selective Compliant Assembly Robot Arm) atau juga bisa disebut dengan Selective Compliant Articulated Robot Arm yang merupakan salah satu jenis Robot Lengan (Arm). Robot SCARA digunakan di industri untuk Material Handling (Packaging, Assembly, dan Pick and Place). Struktur robot SCARA terdiri dari tiga lengan yang terdiri dari gerak rotasi dan translasi. Selanjutnya penjelasan mengenai artikulasi, daerah kerja dan penggunaanya di bidang industri akan dijelaskan sebagai berikut:
- Artikulasi
Robot SCARA adalah robot dengan jumlah sumbu sebanyak 4 sumbu. Robot SCARA tidak memiliki gerakan pitch dan yaw seperti robot enam sumbu. Sebagian besar aplikasi pick dan place dan perakitan kecil yang melibatkan pemindahan bagian dari titik A ke titik B cocok untuk robot SCARA karena ini biasanya hanya melibatkan pemindahan bagian dalam XYZ dengan beberapa rotasi pada sumbu Z.
- Daerah Kerja
Biasanya, robot SCARA memiliki daerah kerja berbentuk silinder dengan variasi diameter dan kedalaman silinder. Panjang total lengan satu dan dua menentukan diameter lingkaran, sedangkan jangkauan Z menentukan kedalaman silinder. Dalam sebagian besar aplikasi, daerah kerja SCARA terdapat di bagian depan dan samping. Area belakang mungkin tidak bisa digunakan jika kabel dan selang pneumatik keluar di belakang, beberapa SCARA menawarkan opsi untuk kabel dan selang keluar melalui bagian bawah sehingga memungkinkan robot untuk bekerja di bagian belakang.
- Penggunaan di bidang industri
Robot SCARA yang digunakan dalam bidang industri dapat meningkatkan kecepatan produksi serta melakukan gerakan yang berulang-ulang sesuai dengan program kerjanya untuk memindahkan barang atau melakukan tugas dari satu tempat ke tempat yang lain, contohnya pada bidang industri perakitan otomotif, elektronik atau bidang industri lainnya. Robot ini cocok untuk digunakan dalam bidang industri perakitan karena kecepatan, keakuratan dan daya tahan untuk melakukan pergerakan secara horizontal dengan tetap mempertahankan kondisi vertikalnya.
Beikut ini tahapan desain dan simulasi robot SCARA memnggunakan:
- Solidworks 2018
- 3D Builder
- Processing IDE
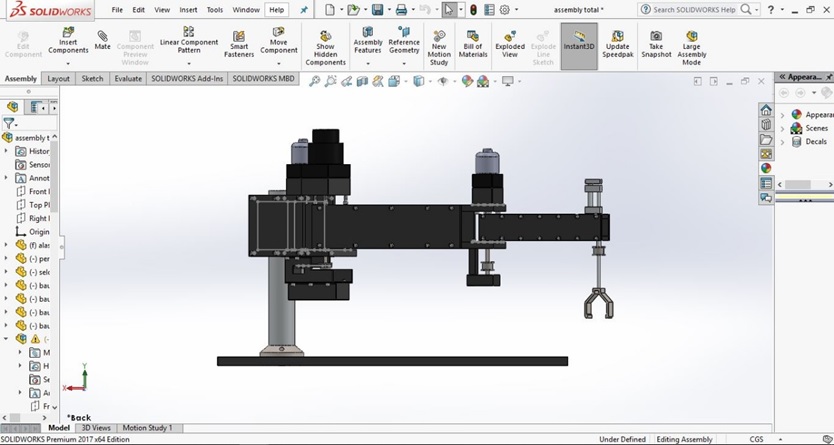
Step 1 : Desain Mekanik
Menggunakan aplikasi Solidworks untuk mendesain CAD nya. Pada gambar mekanik ini kita membuatnya dengan referensi dari GrabCAD dan juga dari laboratorium Instrumentasi dan Kendali SV UGM. Kita mulai menggambarnya dari bagian base terlebih dahulu kemudian mulai menggambar bagian lengannya.
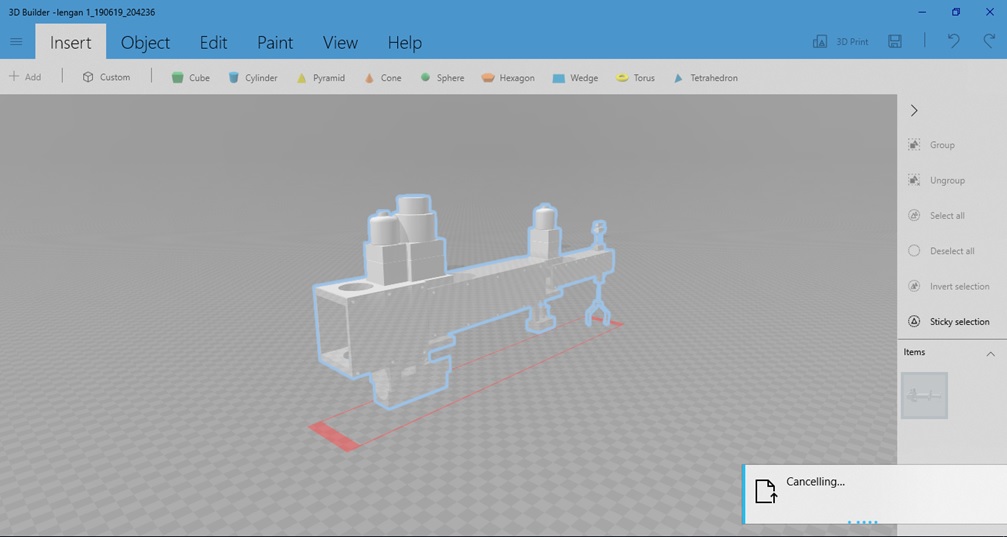
Step 2 : Merubah tipe file dari .stl ke .obj
Menggunakan aplikasi 3D Builder, pada step ini digunakan karena untuk menampilkan bentuk CAD di Processing IDE menggunakan tipe file .obj, dimana kita mendapatkan tipe file .stl dari Solidworks maka kita harus merubahnya dahulu.
Step 3 : Menampilkan gambar CAD di Processing IDE
Menggunakan aplikasi Processing IDE, untuk menampilkan gambar CAD kita menggunakan aplikasi Processing dikarenakan dengan menggunkan aplikasi ini kita bisa memberi parameter-parameter untuk menggerakan Robot Scara yang kita buat. Pada Processing IDE kita menggunakan bahasa pemrograman Java untuk mengatur bentuk CAD yang kita buat. Mulai dari memasukkan file CAD yang kita buat hingga memggerakan setiap lengan yang kita buat pada aplikasi sebelumnya. Dengan Processing IDE juga kita bisa menampilkan tampilan yang lebih menarik, dengan perpaduan warna yang dapat kita pilih.
Disusun oleh:
Recent Comments