Industri modern saat ini tengah berkembang pesat, salah satunya yakni industri makanan dan minuman. Pengepakan merupakan salah satu proses yang sangat penting dalam industri makanan dan minuman. Pengepakan bertujuan untuk melindungi produk dari tekanan maupun guncangan selama penanganan, penyimpanan, pemasaran, serta pendistribusian sehingga memudahkan konsumen saat pembelian sesuai kebutuhan, dan menjaga penampilan agar tetap menarik sampai ke tangan konsumen.
Untuk melakukan pengepakan dalam jumlah besar dengan waktu seminimal mungkin tentu diperlukan suatu teknologi yang dapat memudahkan proses pengepakan tersebut. Sistem pengepakan jeruk otomatis merupakan sebuah sistem pengepakan jeruk menggunakan PLC beroperasi secara otomatis menggunakan sensor. Mitsubishi FX – PLC trainer adalah software pelatihan, yang bisa digunakan untuk para pemula dalam mempelajari pemrograman PLC merek Mitsubishi. Pada software pelatihan ini terdapat banyak aplikasi PLC di industri dengan 5 kategori mulai dari pemula hingga mahir dengan salah satu pengaplikasiannya yaitu pada pengepakan barang.
Alur cerita proses simulasi
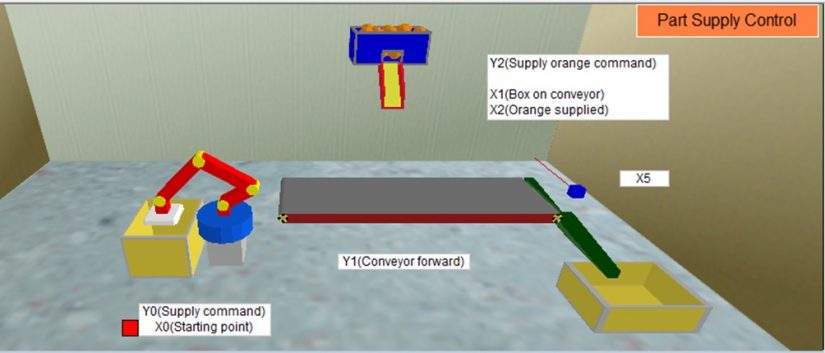
Simulasi secara sederhana sistem pengepakan jeruk ini dapat dilihat pada Gambar 1. Proses simulasi dimulai saat tombol START ditekan sehingga konveyor berjalan. Kemudian saat Push Button 1 ditekan maka Arm robot akan mensuplai box yang selanjutnya digunakan untuk tempat pengepakan jeruk dan box berjalan di konveyor. Saat boc berada di bawah penyuplai jeruk, konveyor berhenti dan jeruk mulai disuplai ke dalam box sebanyak 5 buah dengan aplikasi counter. Jika sudah mencapai 5 buah maka penyuplai jeruk akan berhenti dan konveyor box aktif kembali menyalurkan box yang berisi jeruk pada tempat yang telah disediakan. Proses akan terus berulang jika Push Button 1 ditekan.
Tabel I/O
Adapun input dan output yang digunakan pada simulasi proses pengepakan jeruk dijelaskan pada tabel berikut:
Tabel 1. Data Input dan Output
| Alamat | Keterangan | |
| INPUT | X24 | Tombol Start |
| X0 | Sensor memulai sistem | |
| X1 | Pendeteksi box | |
| X2 | Sensor jeruk | |
| X5 | Sensor box yang telah tersuplai | |
| OUTPUT | YO | Supply command box |
| Y1 | Conveyor | |
| Y2 | Penyuplai jeruk |
Model State Diagram
State diagram adalah diagram yang digunakan untuk medeskripsikan perilaku sistem. State diagram berguna untuk memetakan cara kerja atau langkah-langkah dari program yang akan dibuat. Serta untuk mengetahui proses dari program tersebut dengan cara menentukan input, output, dan alamatnya program yang akan dibuat.
Adapun rumus state diagram yang digunakan pada program pengepakan buah jeruk dengan PLC adalah sebagai berikut :
T = ST_Sebelum • Perubahan_Sensor
ST = ( ST + T_masuk) • T_keluar’
Keterangan :
T = Transisi
ST = State/Kondisi
Berikut ini merupakan gambar state diagramnya:
Berdasarkan diagram state di atas diperoleh persamaan sebagai berikut :
Tabel 2. Persamaan State Diagram
| Kondisi | Persamaan | Alamat PLC |
| T0 | X24 | M0 |
| T1 | X2 • X0 | M1 |
| T2 | X1 | M2 |
| T3 | X2 | M3 |
| T5 | C0 | M5 |
| ST1 | (ST1 + T0 + T5) • T1’ | M10 |
| ST2 | (ST2 + T1 +) • T2’ | M20 |
| ST3 | (ST3 + T2) • T5’ | M30 |
| ST4 | (ST4 + T3) • T5’ | M40 |
| OUTPUT | ST2 | Y0 |
| ST1 | Y1 | |
| ST3 | Y2 | |
| ST4 | C0 | |
| ST2 | RSTC0 |
Tabel kebenaran output
Tabel 3. Tabel Kebenaran Output
| State | ST1 | ST2 | ST3 | ST4 |
| Output | ||||
| Y0 | 0 | 1 | 0 | 0 |
| Y1 | 1 | 0 | 0 | 0 |
| Y2 | 0 | 0 | 1 | 0 |
| C0 | 0 | 0 | 0 | 1 |
| RSTC0 | 0 | 1 | 0 | 0 |
Langkah Perancangan Simulasi FX-trainer
- Buka software FX-Trainer

- Pada tampilan awal FX-Trainer akan muncul pilihan 5 kategori. Pilih kategori Intermediate Challenge : E-5. Part Supply Control.

- Kemudian akan muncul tampilan seperti di bawah. Terdapat 4 bagian utama pada simulasi FX-Trainer, yaitu a) Menu Utama b) Petunjuk Instruksi c) Ladder Diagram d) Simulator

- Untuk dapat membuat ladder diagram, klik Edit Ladder.
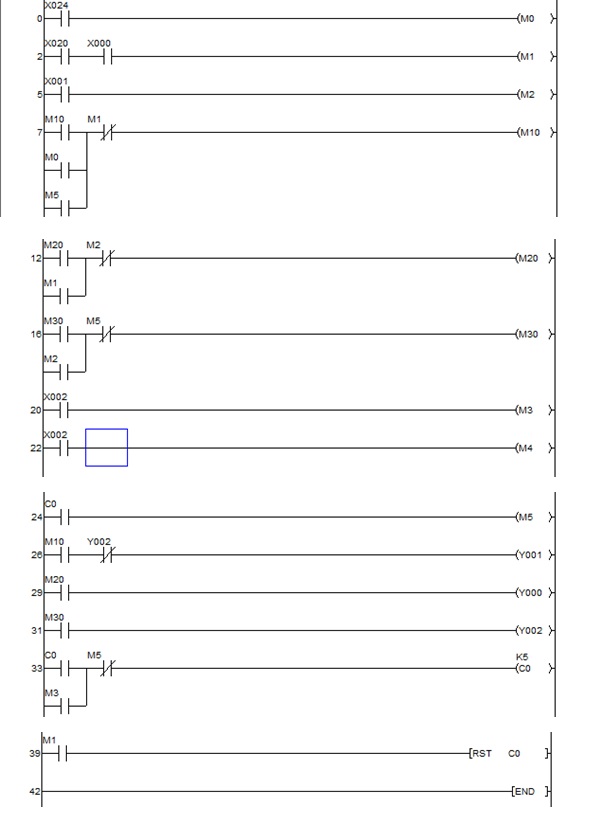
- Buat ladder diagram berdasarkan persamaan state diagram yang telah dibuat pada kolom Ladder
- Setelah ladder selesai dibuat, simulasikan program dengan klik Convert (F4) kemudian Write to PLC. Program akan dikirim ke PLC.
- Tunggu hingga tertampil box dialog seperti di bawah. Program siap disimulasikan.
- Simulasikan program dengan menekan tombol START (X24) terlebih dahulu kemudian PB1 (X20) untuk mensuplai box jeruk.
Penjelasan Cara Kerja
Berdasarkan ladder diagram di atas, proses dimulai saat tombol START (X24) ditekan sehingga konveyor (Y1) berjalan. Kemudian saat PB1 (X20) ditekan maka Supply command (Y0) akan mensuplai box yang selanjutnya digunakan untuk tempat pengepakan jeruk dan box berjalan di konveyor. Sensor X1 berfungsi sebagai pendeteksi box berada di bawah penyuplai jeruk (Y2) sehingga konveyor box berhenti. Selanjutnya Y2 akan mensuplai jeruk satu per satu ke dalam box sebanyak 5 buah dengan aplikasi counter (C0). Jika sudah mencapai 5 buah maka Y2 akan mati dan konveyor box (Y1) aktif kembali menyalurkan box yang berisi jeruk pada tempat yang tersedia. Proses akan terus berulang jika PB1 ditekan.
Disusun oleh:
- Fakhrurrozi Zainal A (17/416785/SV/14523)
- Fergi Fherdinand (17/416786/SV/14524)
- Frista Dwi Novita S (17/416787/SV/14525)
- Istiqomah (17/416794/SV/14532)
