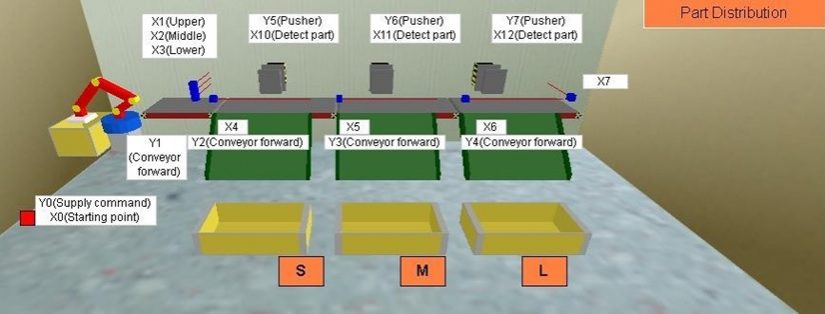
Pemilahan barang sering terjadi di berbagai tempat salah satunya yaitu industri. Kegunaan dari pemilahan barang yaitu supaya barang dapat didistribusikan dengan sesuai dan lebih rapi. Pemilahan barang seperti ini dapat dilakukan melalui aplikasi, salah satunya yaitu menggunakan simulasi FX-Trainer. Bagaimana caranya? Yuk kita simak penjelasan di bawah ini. FX-Trainer merupakan salah satu aplikasi PLC yang digunakan untuk PLC merek Mitsubishi. Cara kerja dari PLC yaitu mengontrol sistem dengan cara menganalisa masukan lalu mengatur kondisi keluaran sesuai keinginan pengguna. Untuk simulasi ini menggunakan kasus di level advance F3. Alur proses dari simulasi ini yaitu supply command akan mengeluarkan kotak ketika menekan PB1 (X20). Setelah kotak berada di atas conveyor, menekan PB2(X21) untuk menjalankan conveyor dan sensor akan mendeteksi ukuran kotak tersebut. Saat sensor pendeteksi ukuran kotak bekerja maka kotak akan terdorong ke dalam box yang sesuai. Setelah mendistribusikan sesuai dengan ukurannya, kotak tersebut akan jatuh ke tempat yang sesuai. Hal tersebut akan terulang sesuai dengan berapa banyak kotak yang diinginkan. Berikut merupakan model state diagram, tabel persamaan, dan ladder diagram dari simulasi ini:
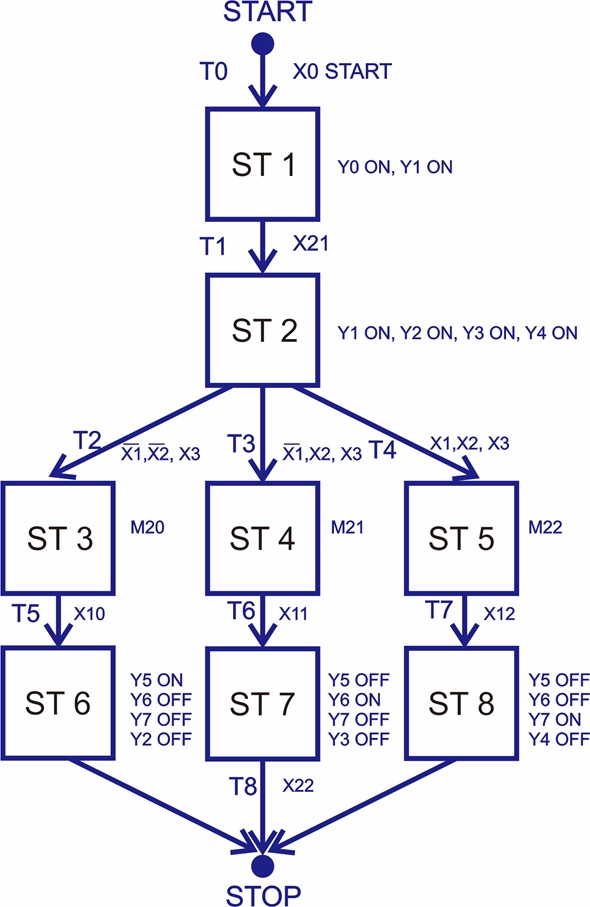
Gambar 1. State diagram dari simulasi part distribution
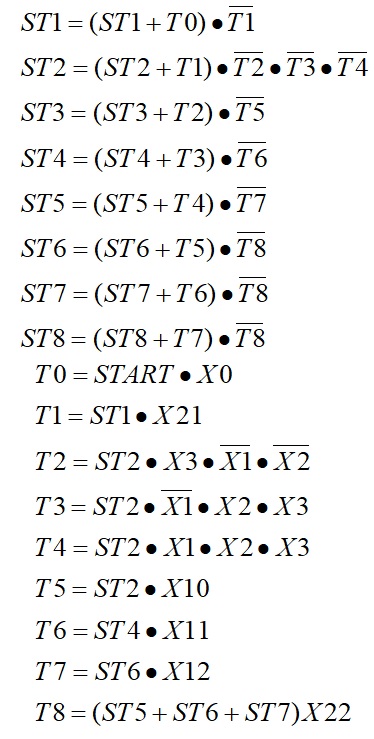
Pada state diagram diatas dapat dibuat persamaan sebagai berikut:
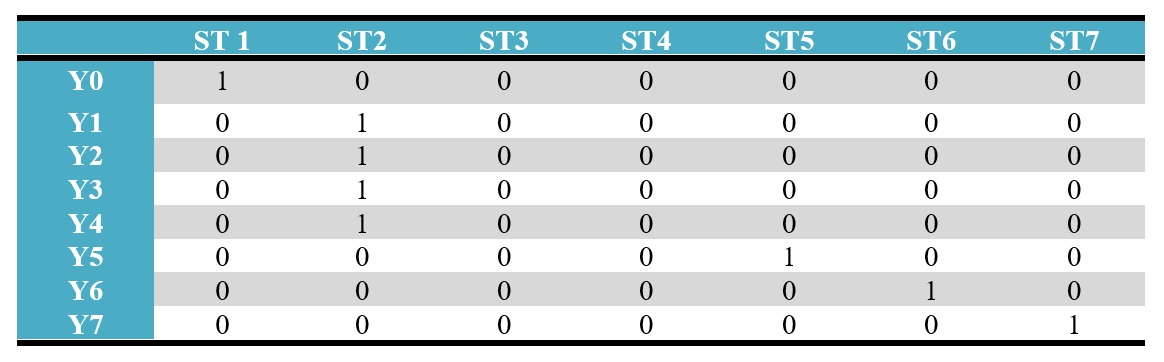
Tabel 1. Tabel Kebenaran dari simulasi part distribution
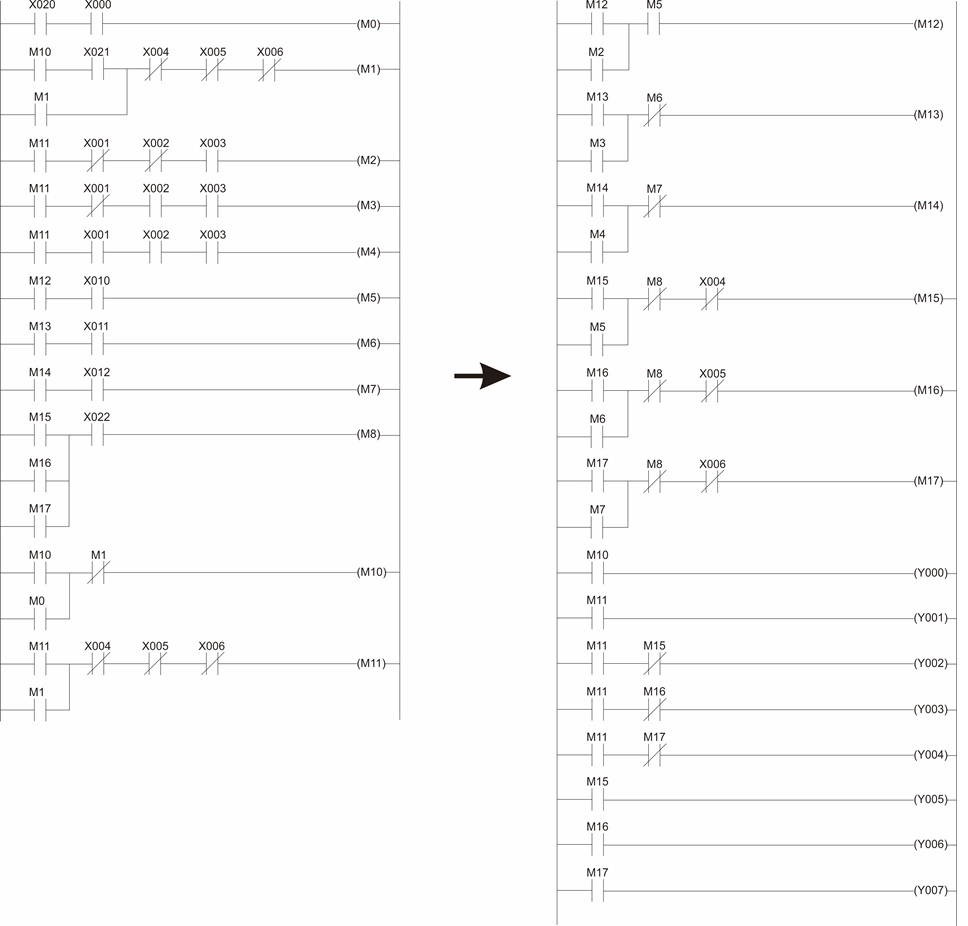
Gambar 2. Ladder diagram dari simulasi part distribution
Dalam menggunakan software FX-Trainer untuk simulasi part distribution ini, ada beberapa langkah yang harus dilakukan, yaitu:
- Membuka aplikasi FX-Trainer dan akan muncul pilihan level yang dapat disimulasikan. Untuk membuat simulasi part distribution, level yang dipilih adalah advanced challenge. Lalu pilih F-3. Part Distribution.
- Untuk memulai membuat ladder diagram, yang pertama dilakukan adalah memilih [Edit Ladder].
- Program ladder diagram part distribution dapat di-input-kan pada area ladder program .
- Setelah program selesai dibuat, tekan tombol [F4] pada laptop atau komputer untuk mengonversi program yang telah dibuat.
- Pada area ladder program, pilih [Online] kemudian pilih [Write to PLC] untuk memasukkan program yang telah dibuat ke PLC yang akan disimulasikan.
- Untuk memulai simulasi, tombol PB1 (X20) ditekan untuk memerintahkan supply command mengeluarkan kotak. Setelah box keluar, tombol PB2 (X21) ditekan untuk menjalankan konveyor.
- Setelah konveyor berjalan, sensor akan mendeteksi ukuran dari kotak yang berjalan. Ada tiga ukuran kotak yang dideteksi yaitu S, M, dan L. Ketika sensor telah mendeteksi ukuran suatu kotak maka kotak tersebut akan didorong ke dalam box yang sesuai dengan ukurannya.
- Untuk mengulangi simulasi dari awal maka dapat dipilih tombol [Reset] pada remote control.
Disusun Oleh :
- Dwiantono Jatinugroho (17/416780/SV/14519)
- Enggar Dwi Nurhayati (17/416781/SV/14519)
- Evita Priherdini (17/416782/SV/14520)
- Faisal Zeqlyw H. (17/416784/SV/14522)
- Hafriz Rafiuddin (17/416790/SV/14528)
