Many hexapod robot are biologically inspired by hexapod locomotion. In this article, we will show the example from hexapod robot that inspired by hexapoda locomotion that is the black scorpion hexapod. In robotic hexapod can be explain by mechanical vehicle that walks on six legs. Since a hexapod robot can be statically stable on three or more legs, a hexapod robot has a great deal of flexibility inhow it can move. If legs become disabled, the robot still be able too walk. Furthermore, not all of the robot’s legs are needed for stability.
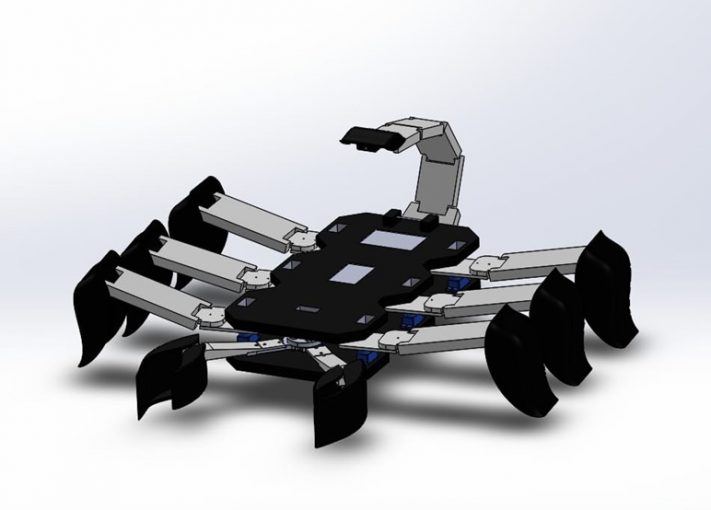
Like a real scorpion we designed the black scorpion hexapod with six-legs that can move in all direction and responds to any interaction. We using solidworks when we designing this robot. Solidworks is a CAD and CAE software that enable controlling various design parameters of parts and combine them with assembly function. The black scorpion hexapod has been programmed with numerous moves and some auto responses to interaction, though live control via computer is also posible. A long range sensors positioned in the upper shell are used to detect user proximity and there’s a front facing camera.
The black scorpion hexapod can walk in all direction, step over elevated surface and perform movements a real scorpion would such as, move its claws and strike its tail. There is marker that added instead of the tail of the black scorpion hexapod so when there is anyone who dares to get too close the black scorpion hexapod will stabs that person using that marker and it will leave a stamp on scorpion’s prey.
Designed by:
- Ahmad Bayu Pamungkas (19/447070/SV16789)
- Muhammad Ahza Hafiz Fahresi (19/447080/SV/16799)
- Saschova Eta Nur Layla (19/447295/SV/16989)
can u give me the TAIL part in SW