
“Robot delta adalah jenis robot paralel yang terdiri dari tiga lengan yang terhubung ke sambungan universal di pangkalan. Fitur desain utama adalah penggunaan jajaran genjang di lengan, yang mempertahankan orientasi efektor akhir, berbeda dengan platform Stewart yang dapat mengubah orientasi efektor ujungnya.”
Dikutip dari https://en.wikipedia.org/wiki/Delta_robot
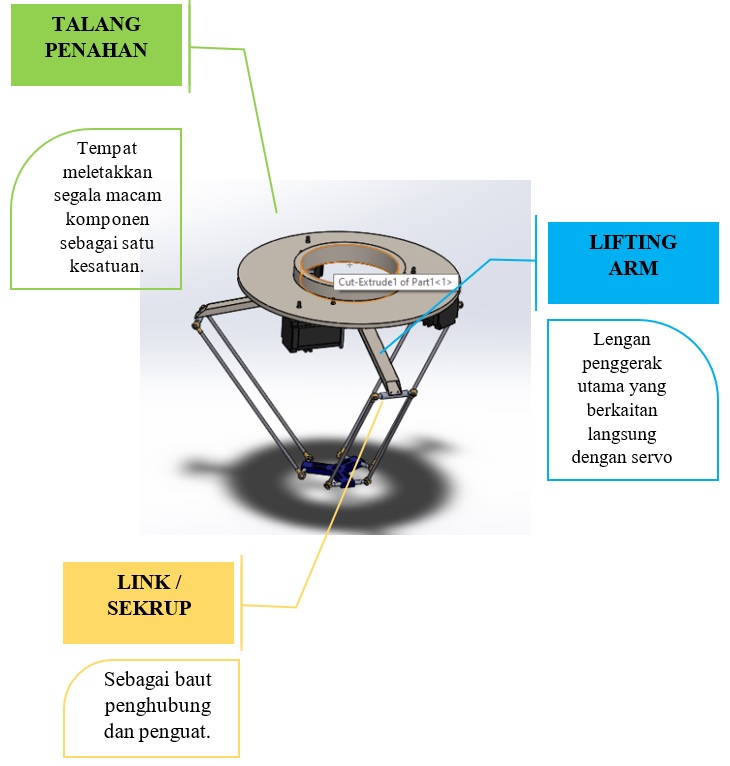
Delta robot yang merupakan robot 3 lengan dengan prinsip keseimbangan memilliki banyak peran dalam bidang otomasi, utamanya otomasi industri. Robot delta memiliki bagian – bagian berupa substrat, penutup, motor, poros utama, rekayasa / manipulator lengan, gripper, dan lain – lainnya ini memiliki peran sebagai robot pengemas, robot penyortir, pengemasan material, dan bahkan pengelas.
Prinsip kerja dari robot delta ini didasari oleh fuzzy function logic, dan juga perhitungan besarnya sudut bebas untuk dasar gerakan lengan. Robot delta, sejatinya juga dilengkapi dengan sensor visi dan sensor ultrasonik mendapatkan perintahnya dengan alur menerima visi melalui kamera / sensor visi, yang kemudian akan memperhitungkan posisi dan koordinat dari objek yang akan diberi perintah. Robot delta memiliki tingkat akurasi tinggi karena dilengkapi dengan fungsi logika fuzzy dan juga berbagai macam sensor yang cukup peka pula.
Link grabcad:
https://grabcad.com/library/delta-robot-15
Disusun oleh:
- Wening Nur Suminar (19/441169/SV/16521)
- Aftzar Arrahman (19/447285/SV/16979)
- Elisabet Gusti Tristiati (19/441156/SV/16508)
would you mind sending me the accurate solidwork design of deltarobot with exported simulink matlab