
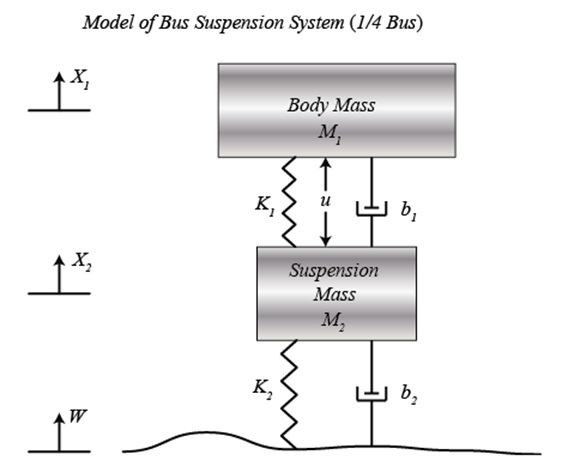
Bus merupakan alat transportasi yang sangat menunjang bagi kehidupan manusia, dimana terdapat sistem suspensi untuk memberikan kenyamanan dalam berkendara akibat ketidakrataan permukaan jalan, penyearahan jalan, dan isolasi baik dari getaran jalan. Dalam penelitian ini dikaji model matematika dan masalah pengendalian sistem suspensi aktif pada model kendaraan seperempat. Desain kendali menggunakan LQR dengan Simulink Matlab dapat dirancang melalui model matematika dari persamaan dinamis sistem dan persamaan state space. Sistem dengan kendali LQR diharapkan mampu mengendalikan suspensi dengan baik, yang memiliki respon keluaran sistem menjadi cepat dan tidak memiliki error steady state.
Teknik kendali yang digunakan yaitu LQR (Linear Quadratic Regulator) karena dapat mengendalikan sistem dengan bersifat MIMO. Hasil yang diperoleh akan disimulasikan dalam program Simulink Matlab. Tujuan dari kendali optimal dengan LQR untuk menentukan sinyal kendali yang akan menghasilkan proses sesuai dengan batasan spesifikasi fisik sistem dan pada saat bersamaan akan meminimumkan atau memaksimumkan beberapa kriteria performansi. Pengukuran dilakukan dengan menentukan indeks performansi, yang merupakan suatu fungsi dan menunjukkan seberapa besar kinerja sistem yang sesungguhnya sesuai dengan kinerja yang diinginkan.
Gangguan jalan (W) pada masalah ini disimulasikan dengan input step. Step menggambatkan bus keluar dari lubang jalan setinggi 10 cm, maka pengaturan pada step yaitu 0.1. dengan mensimulasikan tinggi step tidak melebihi 10 cm agar bodi bus yang rendah tidak langsung mengenai gangguan jalan. Desain kendali yang diinginkan yaitu menghasilkan respon keluaran system menjadi cepat dan tidak memiliki error steady state. Selanjutnya untuk pemodelan sistem, pemodelan matematis, dan simulasi secara lengkap dapat dilihat pada video berikut.
Disusun oleh Innes Danarastri (19/450795/SV/17133)