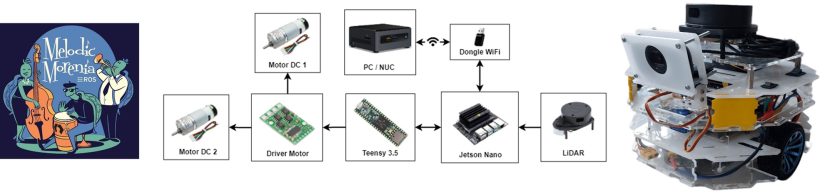

Desain Differential Drive Wheel Robot terdiri dari perangkat elektronika dan mekanika. Untuk perangkat PCB utama yang berisi, mikrokontroler (Teensy), driver motor DC, dan min-PC (Jetson Nano) dengan struktur mekanik robot seperti pada Gambar berikut:
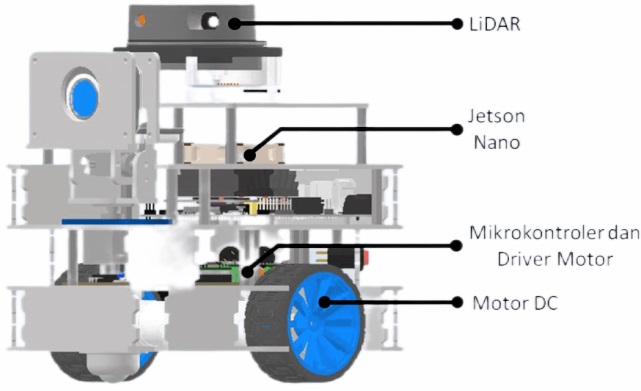
Berikut merupakan detail kegunaan perangkat keras pengusun differential drive wheel robot yang digunakan:
- LiDAR A1M8, dengan frekuensi sebesar 10kHz yang digunakan untuk membaca dan mengirimkan data jarak dan sudut orientasi robot ke Jetson Nano untuk diproses menjadi data laser scan untuk pemetaan.
- Jetson Nano 4GB, sebagai otak dari robot yang melakukan proses pengolahan SLAM dan navigasi. Jetson Nano juga akan pengiriman data LiDAR, odometri, dan struktur robot ke stasiun utama yaitu NUC untuk ditampilkan.
- NUC digunakan sebagai komputer utama yang akan memproses dan menampilkan segala perintah yang diberikan dari Jetson Nano dan sebaliknya. Proses tersebut dilakukan dengan secara nirkabel menggunakan koneksi virtual.
- Elektronik kontroler, bagian ini terdiri dari mikrokontroler Teensy 3.5, buck converter, driver motor, dan rangkaian pendukung lain seperti pada Gambar berikut:
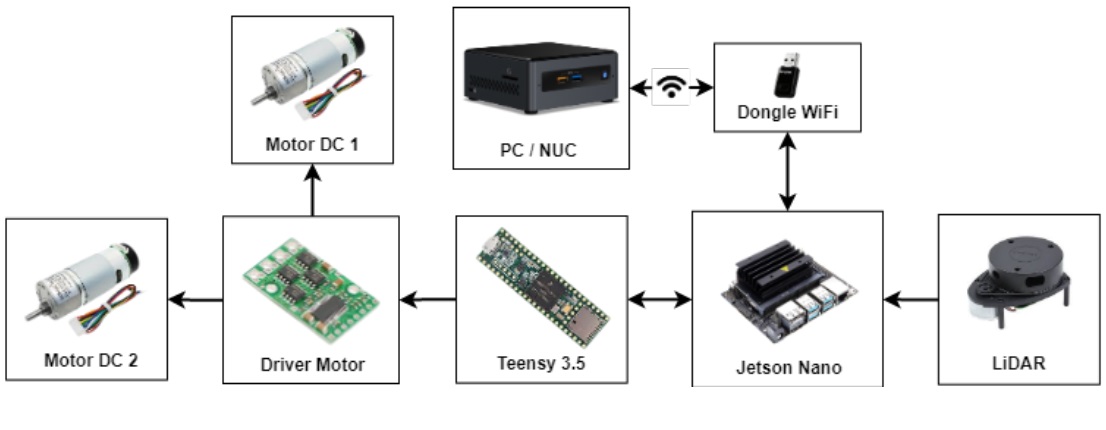
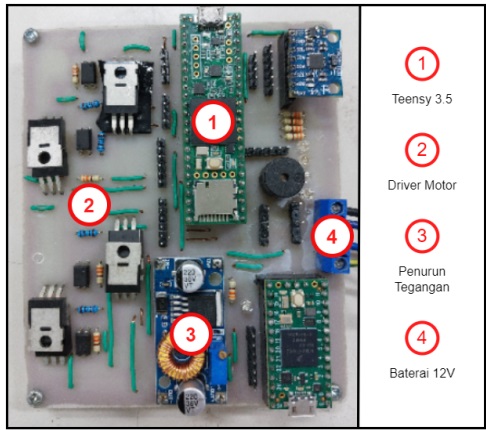
Di bagian ini Teensy 3.5 berfungsi untuk memproses data encoder sehingga dapat menghasilkan data odometri yang dapat dikomunikasikan secara serial dengan Jetson Nano. Teensy juga berperan untuk mengendalikan kedua motor dengan bantuan driver motor terhadap input yang diberikan menggunakan kendali PID untuk mengatur kecepatan motor DC dari robot.