Perkembangan teknologi Unmanned Aerial Vehicle (UAV) atau drone telah merevolusi berbagai industri, mulai dari pemetaan presisi, agrikultur, hingga sinematografi. Namun, salah satu tantangan terbesar bagi para pengembang, peneliti, dan penghobi adalah tingginya biaya flight controller (FC) otak dari sebuah drone yang tersedia di pasaran. Menjawab tantangan ini, tim mahasiswa dari Departemen Teknik Elektro dan Informatika, Sekolah Vokasi UGM, berhasil merancang dan membangun sebuah prototipe flight controller yang fungsional, andal, dan yang terpenting, berbiaya sangat rendah.
Capstone Project yang berjudul “Rancang Bangun Flight Controller UAV Berbiaya Rendah Menggunakan STM32F411 dan GY-87 dengan Integrasi iNav” ini membuktikan bahwa teknologi drone yang canggih tidak harus mahal.
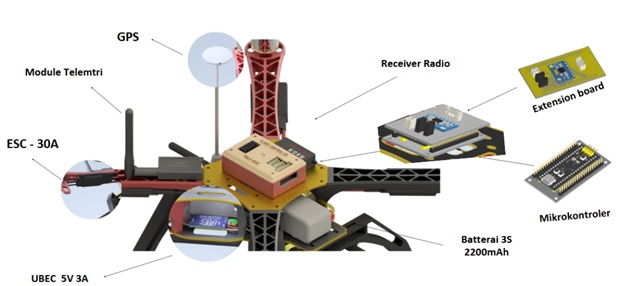
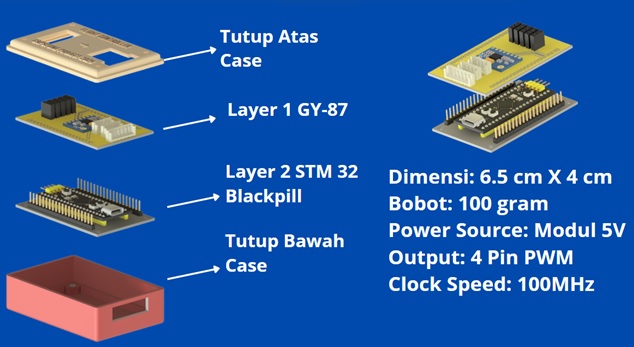
Komponen Utama dan Spesifikasi
Flight controller ini dibangun menggunakan mikrokontroler STM32F411, yang dikenal dengan kemampuannya yang mumpuni namun tetap terjangkau. MCU ini ditenagai oleh inti prosesor ARM Cortex-M4 dengan kecepatan 100MHz dan dilengkapi Floating Point Unit (FPU), memungkinkannya untuk melakukan kalkulasi matematis yang kompleks untuk algoritma penerbangan dengan cepat dan efisien. Untuk “indra” sensor, tim ini menggunakan modul GY-87 yang menyediakan 10 Degrees of Freedom (DOF) data dari tiga sensor penting:
- Akselerometer dan Giroskop (MPU6050): Berfungsi untuk mengukur percepatan dan orientasi drone.
- Magnetometer (HMC5883L): Digunakan untuk menentukan arah mata angin.
- Barometer (BMP180): Berfungsi untuk mengukur ketinggian drone dari permukaan tanah.
Dengan kombinasi komponen ini, total biaya perangkat keras dapat ditekan hingga di bawah Rp 200.000, jauh lebih ekonomis dibandingkan produk komersial sejenis yang harganya dapat mencapai jutaan rupiah.
Integrasi Software dengan iNav
Salah satu keunggulan utama dari proyek ini adalah integrasinya dengan perangkat lunak open-source iNav. iNav adalah sebuah firmware populer yang menyediakan berbagai fitur canggih untuk navigasi dan kendali UAV. im memanfaatkan firmware open-source iNav, sebuah platform perangkat lunak yang sangat kuat dan populer di komunitas drone. iNav menyediakan kerangka kerja untuk berbagai mode penerbangan canggih, mulai dari mode manual (Acro), mode stabil (Angle), hingga mode navigasi berbasis GPS seperti Position Hold dan Return to Home (RTH).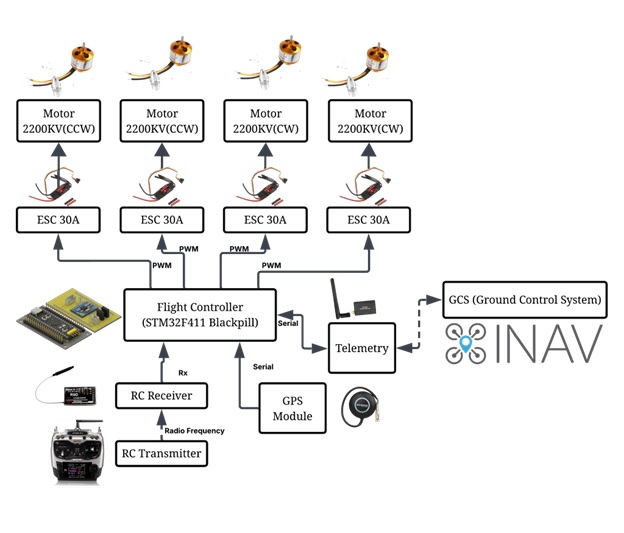
Hasil dan Manfaat
Melalui serangkaian pengujian, prototipe flight controller ini telah terbukti mampu bekerja dengan baik dan stabil saat dilakukan simulasi menggunakan alat tuning PID (Proportional-Integral-Derivative). Keberhasilan proyek ini menunjukkan bahwa dengan komponen yang tepat dan perangkat lunak open-source, kita dapat membangun flight controller yang fungsional dengan biaya yang jauh lebih rendah dibandingkan produk komersial.
Pengembangan flight controller berbiaya rendah ini diharapkan dapat memberikan beberapa manfaat, antara lain:
- Meningkatkan Aksesibilitas: Memudahkan mahasiswa, peneliti, dan penggemar drone untuk mengembangkan UAV mereka sendiri.
- Mendorong Inovasi: Membuka peluang untuk penelitian dan pengembangan lebih lanjut di bidang teknologi UAV.
- Mendukung Pendidikan vokasi: Menunjukkan kemampuan mahasiswa Sekolah Vokasi UGM dalam menerapkan ilmu teoritis untuk menciptakan solusi teknologi yang praktis, aplikatif, dan relevan dengan kebutuhan industri.
Proyek ini adalah bukti nyata semangat inovasi dan kolaborasi, menunjukkan bahwa dengan pengetahuan yang tepat dan pemanfaatan ekosistem open-source, batasan biaya dalam teknologi dapat diatasi.

[embedyt] https://www.youtube.com/watch?v=D1MTNgdnt68[/embedyt]
Poster-Rancang-Bangun-Flight-Controller-UAV-Berbiaya-Rendah-menggunakan-STM32F411-dan-GY-87-dengan-Integrasi-iNAV