Produksi energi dari panel surya kerap mengalami fluktuasi akibat perubahan cuaca dan kondisi lingkungan seperti intensitas cahaya, suhu, dan sudut datang cahaya, yang menyebabkan output energi kurang optimal. Untuk mengatasi tantangan ini, dikembangkan inovasi pengoptimalan daya panel surya berbasis teknologi Maximum Power Point Tracking (MPPT) yang mampu menjaga titik operasi panel pada daya maksimum meskipun terjadi perubahan kondisi lingkungan (intensitas cahaya matahari yang diterima). Penerapan teknologi ini tidak hanya menjawab tantangan teknis, tetapi juga berkontribusi nyata terhadap pencapaian Sustainable Development Goals (SDGs), khususnya tujuan ke-7 tentang akses energi yang terjangkau, andal, berkelanjutan, dan modern untuk semua, serta tujuan ke-13 terkait penanganan perubahan iklim melalui pengurangan emisi karbon. Dalam capstone project ini, dirancang sistem Solar Charge Controller (SCC) yang mengimplementasikan teknologi MPPT menggunakan algoritma Perturb and Observe (P&O) untuk mengoptimalkan pemanfaatan daya dari panel surya secara adaptif terhadap kondisi lingkungan yang berubah-ubah.


Komponen Utama dan Spesifikasi
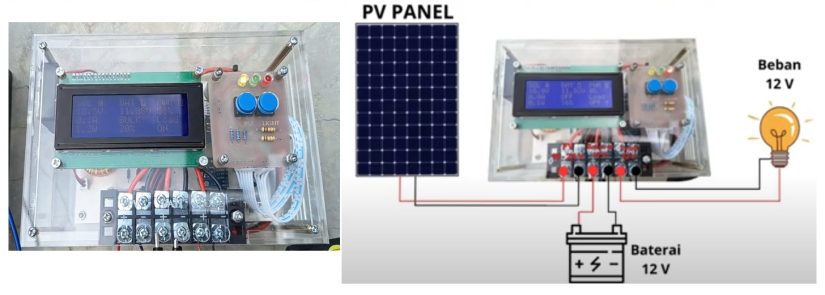
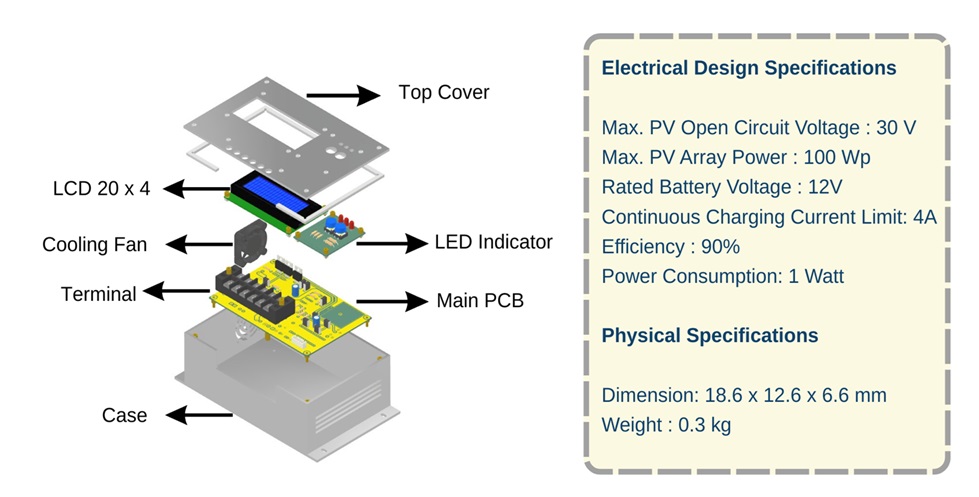
Dalam mendukung kinerja sistem secara optimal, dirancang sebuah perangkat dengan spesifikasi teknis yang terukur, baik secara elektrikal maupun fisik. Desain ini mencakup komponen utama seperti LCD display, kipas pendingin, LED indikator, serta terminal dan papan rangkaian utama (PCB), yang terintegrasi dalam casing pelindung. Desain Solar Charge Controller dirancang untuk mengoptimalkan daya keluaran dari panel surya maksimum 100 Wp, yang kemudian disalurkan untuk pengecasan baterai/aki.
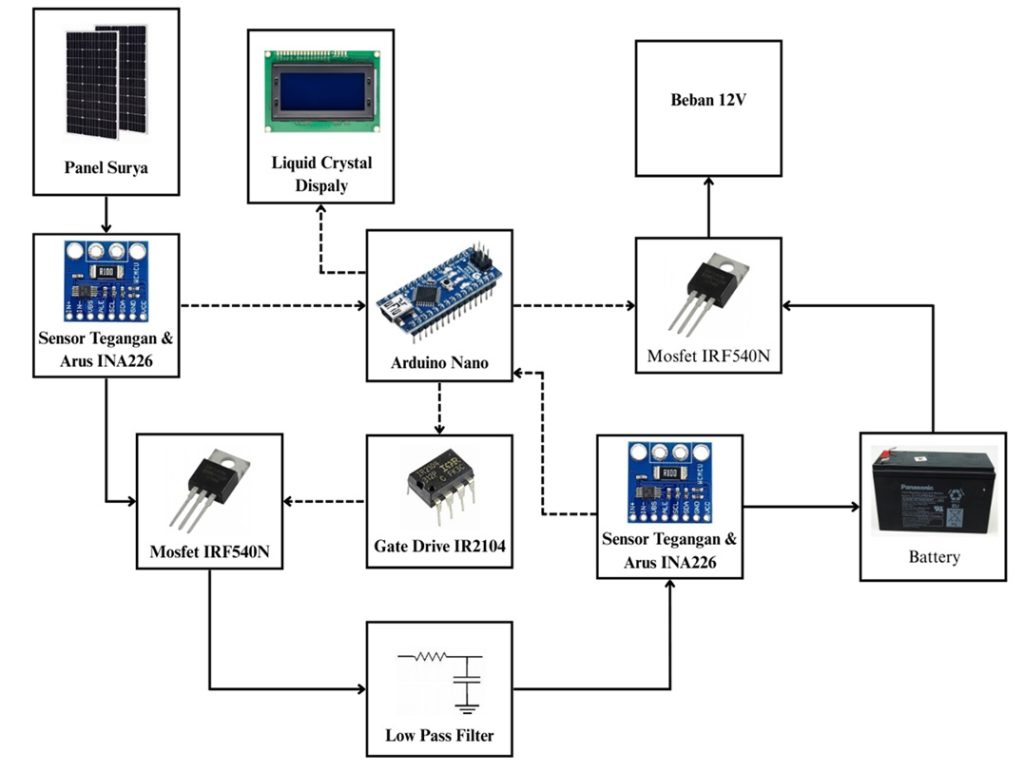
Salah satu algoritma yang digunakan dalam sistem MPPT adalah Perturb and Observe, yang bekerja dengan cara mengganggu (perturb) nilai tegangan atau arus pada panel surya secara bertahap dan mengamati (observe) perubahan daya yang dihasilkan. Algoritma ini ditanamkan pada mikrokontroler Arduino Nano, yang berperan sebagai pusat kendali dalam sistem Solar Charge Controller (SCC). Mikrokontroler ini memproses data sensor dan mengatur output sistem agar optimal. Desain Solar Charge Controller dilengkapi dengan berbagai komponen pendukung agar diperoleh performa sistem yang optimal diantaranya:
- Sensor INA226, sebagai komponen yang melakukan pembacaan nilai tegangan-arus di sisi input dan output.
- Buck Converter, sebagai komponen aktuator yang dikontrol oleh logika MPPT sehingga menyesuaikan tegangan output melalui teknik Pulse Width Modulation.
- Liquid Crystal Display / LCD, berfungsi sebagai komponen yang menampilkan parameter tegangan, arus, duty cycle PWM, hingga daya charging baterai.
- Kipas, sebagai komponen yang berfungsi untuk menurunkan suhu komponen sistem sehingga mencegah overheating yang dapat menyebabkan penurunan efisiensi kerja dan kerusakan komponen.
Algoritma Perturb and Observe (P&O) bekerja dengan prinsip dasar mengamati perubahan daya output panel surya terhadap gangguan kecil (perturbasi) pada tegangan, untuk menentukan apakah sistem bergerak menuju titik daya maksimum (Maximum Power Point, MPP) atau menjauhinya. Proses diawali dengan mengukur tegangan (V) dan arus (I) dari panel surya pada saat tertentu. Dari data tersebut dihitung nilai daya (P = V × I), kemudian dibandingkan dengan nilai daya pada waktu sebelumnya untuk memperoleh perubahan daya (ΔP) dan perubahan tegangan (ΔV). Jika daya meningkat, algoritma akan melanjutkan perubahan ke arah yang sama hingga tercapai titik maksimum. Proses ini berlangsung secara berulang, di mana sistem secara terus-menerus memantau perubahan daya dan tegangan untuk menjaga agar panel surya beroperasi pada titik kerja optimal (MPP) meskipun kondisi lingkungan berubah.

Hasil dan Manfaat
Melalui serangkaian pengujian, prototipe desain Solar Charge Controller yang dirancang mampu untuk melakukan optimalisasi daya keluaran dari panel surya untuk pengecasan baterai meski intensitas cahaya berubah-ubah. Keberhasilan ini menunjukkan bahwa dengan perangkat yang mudah ditemukan seperti Arduino, kita dapat membangun sistem Solar Charge Controller dengan logika yang kompleks. Dengan adanya prototipe desain Solar Charge Controller berbasis kontrol algoritma Perturb and Observe, diharapkan dapat memberikan manfaat antara lain:
- Meningkatkan efisiensi konversi energi dari panel surya.
- Membuka peluang untuk penelitian dan pengembangan algoritma MPPT sehingga diperoleh hasil yang lebih baik.
- Menunjukkan kemampuan mahasiswa Sekolah Vokasi UGM dalam menerapkan ilmu teoritis untuk menciptakan solusi teknologi yang praktis, aplikatif, dan relevan dengan kebutuhan industri.
Poster-Rancang-Bangun-Pengisian-Baterai-menggunakan-Buck-Converter Rancang-Bangun-Maximum-Power-Point-Tracker-dengan-Algoritma-Perturb-and-Observe-PO-berbasis-Arduino-Nano
