Simulasi robot roda dua berbasis ROS2 dan Gazebo ini menjadi representasi nyata dari sistem kendaraan otonom yang sedang dikembangkan di industri otomotif masa kini. Proyek ini memberikan wawasan penting terkait tren teknologi terkini, khususnya dalam bidang sistem navigasi cerdas dan robotika. Selain memperkuat pemahaman teknis lintas bidang seperti elektronika, pemrograman, dan sistem kendali, proyek ini juga melatih keterampilan berpikir logis, pemecahan masalah, dan kerja tim. Secara keseluruhan, membangun simulasi robot line follower adalah pengalaman belajar yang tidak hanya edukatif, tapi juga menyenangkan dan menantang.
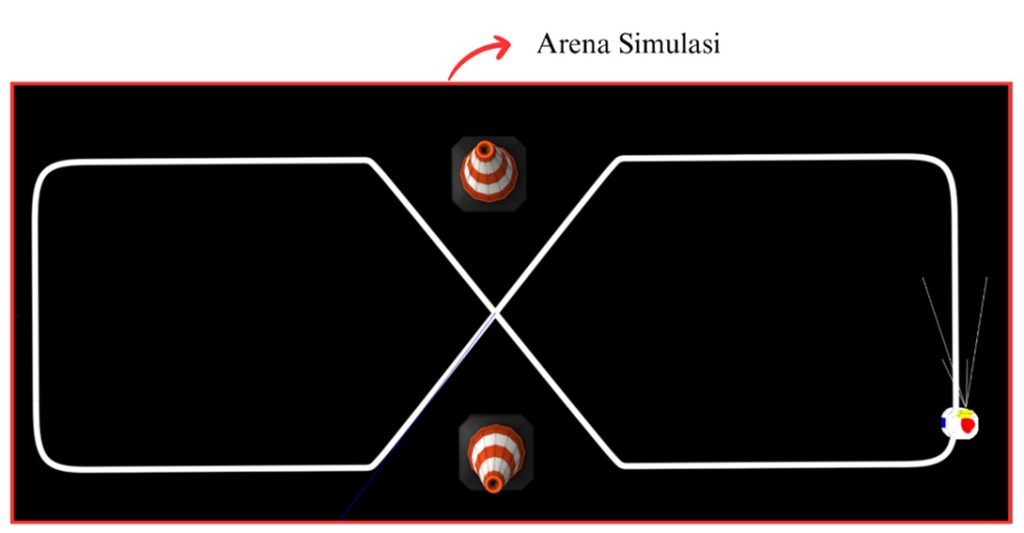
Robot dirancang untuk mengikuti jalur secara otomatis menggunakan sistem navigasi berbasis penglihatan. Kamera virtual mendeteksi jalur berdasarkan perbedaan warna, dan data visual yang diperoleh kemudian diproses secara real-time menggunakan metode differential steering. Dengan pendekatan ini, robot dapat bergerak secara mandiri dan menyesuaikan arah sesuai posisi lintasan yang terdeteksi.
![]()
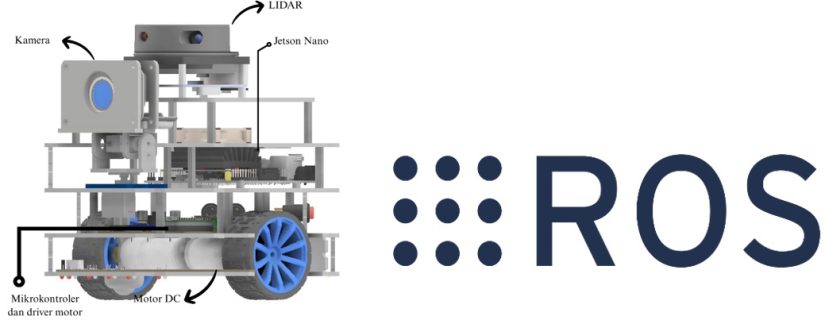
Secara sistemik, simulasi robot ini mengintegrasikan berbagai elemen kendali otomatis, mulai dari pemrosesan visual, kendali kecepatan roda, hingga pengambilan keputusan arah gerak berdasarkan citra yang ditangkap. Sistem dijalankan penuh di lingkungan simulasi Gazebo dengan framework ROS2 sebagai tulang punggung komunikasi antar node.
Sistem Pemrosesan Citra
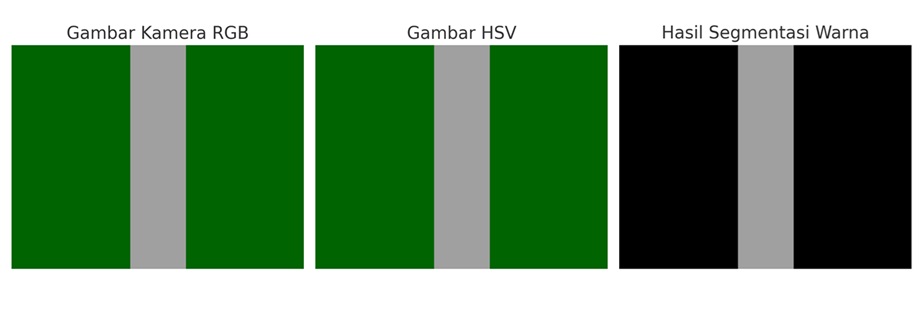
Sistem visual robot memanfaatkan kamera (Red Green Blue) RGB untuk mendeteksi garis berdasarkan warna. Gambar dari kamera diproses menggunakan pustaka OpenCV, diubah ke ruang warna (Hue Saturation Value) HSV untuk deteksi warna yang lebih stabil terhadap pencahayaan, lalu disegmentasi untuk mendapatkan jalur yang diinginkan.
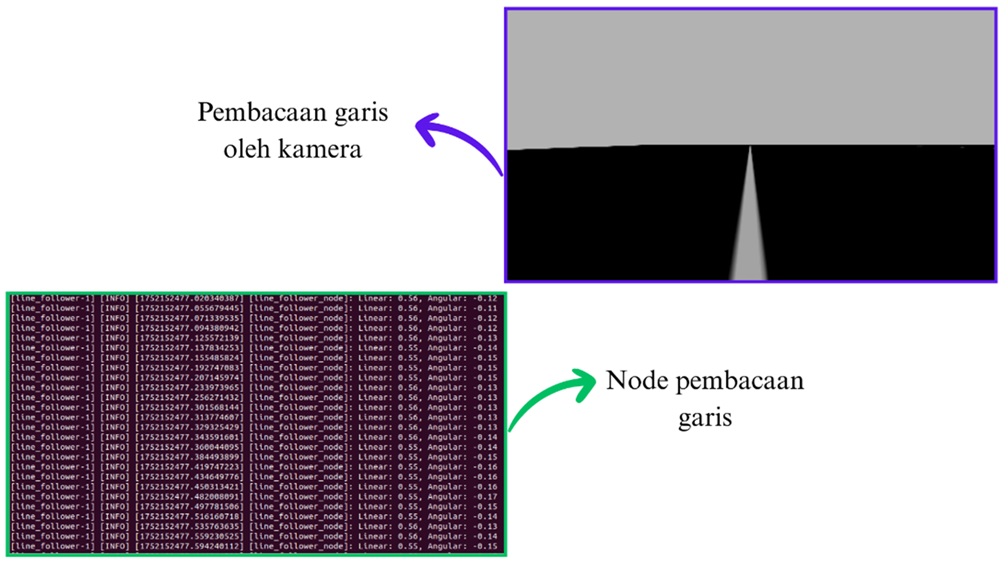
Kontur dari jalur tersebut dianalisis untuk menghitung posisi relatif garis terhadap pusat gambar. Selisih ini dianggap sebagai nilai error yang kemudian diubah menjadi sudut koreksi. Dengan fungsi skala dan algoritma kendali PID, nilai ini digunakan untuk menentukan kecepatan relatif kedua roda agar robot tetap berada di atas jalur. Seluruh proses berlangsung secara real-time dan divisualisasikan melalui output video yang dilengkapi garis kontur, titik tengah, dan estimasi arah.
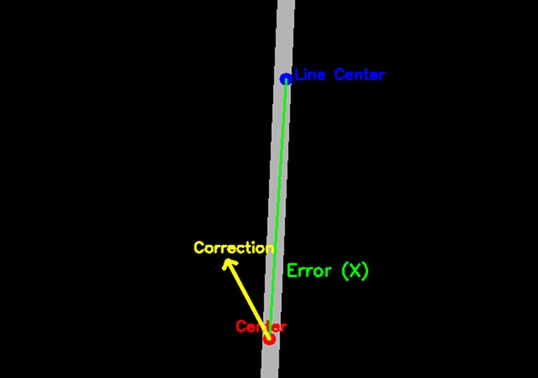
Gambar di atas adalah visualisasi yang menggambarkan proses deteksi dan koreksi arah robot berdasarkan posisi kontur jalur:
- Titik merah menunjukkan pusat gambar (referensi robot).
- Titik biru menandakan pusat jalur hasil deteksi kontur.
- Garis hijau menunjukkan nilai error antara posisi jalur dan pusat gambar.
- Panah kuning menggambarkan arah koreksi yang dihitung menggunakan metode PID.
Seluruh proses image processing dilakukan menggunakan pustaka OpenCV. Pertama, jalur diproses dari citra HSV menggunakan threshold warna abu-abu untuk menghasilkan citra biner. Setelah melalui proses morfologi (erosi dan dilasi), kontur terbesar diidentifikasi sebagai jalur utama. Jalur ini dibagi menjadi tiga bagian vertikal, dan titik tengah dari masing-masing bagian dihitung sebagai referensi arah. Nilai error dihitung dari selisih posisi titik tengah atas jalur terhadap pusat citra, dan nilai ini divisualisasikan serta digunakan sebagai masukan untuk kontrol arah. Visualisasi dilakukan dengan menggambar kontur, titik pusat, dan garis koreksi menggunakan fungsi cv2.line() dan cv2.circle().
Penutup
Simulasi ini tidak hanya menghadirkan pengalaman praktis membangun sistem robotik otonom, tetapi juga memperkenalkan mahasiswa pada implementasi nyata dari teknologi masa depan. Proyek ini membuktikan bahwa inovasi, efisiensi, dan pendidikan berkualitas dapat berjalan beriringan dalam mendukung tercapainya pembangunan berkelanjutan.
Poster-Simulasi-Differential-Drive-Mobile-Robot-menggunakan-ROS2-untuk-Mengikuti-Garis
