Oke, disini saya akan membahas tentang project yang saya telah kerjakan, yaitu membuat PCB (Printed Circuit Board) Rangkaian Servo Controller menggunakan IC NE555 sebagai pengatur lebar pulsa PWM motor servo. Sebelumnya, saya akan membahas sedikit tentang apa itu IC NE555, dan juga apa itu motor servo.
- IC NE555
IC timer 555 merupakan IC atau sirkuit terpadu (chip) yang digunakan dalam berbagai aplikasi pewaktuan, sumber pulsa gelombang, serta aplikasi osilator. IC ini dapat dimanfaatkan dalam rangkaian elektronika sebagai penunda waktu (Delay Timer).. Secara fisik IC NE555 berbentuk DIP (Dual Inline Package) dengan kaki berjumlah 8 pin.
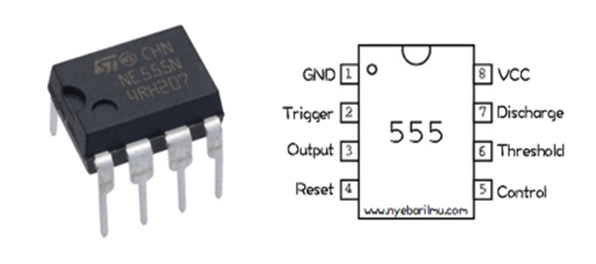
- GND : Ground
- Trigger : Sebagai pemantik agar pengatur tempo berkerja
- Output : Penghubung ke beban contohnya : Motor Servo
- Reset : Guna untuk menghentikan interval tempo jika dihubungkan dengan ground
- Control : Pengakses pembagi tegangan sebesar 2/3 VCC
- Threshold : Penentu waktu tempo
- Discharge : Biasanya dihubungkan ke kapasitor elektrolit, dan pada waktu pembuangan muatan el-co digunakan untuk menentukan interval tempo
- VCC : Tegangan masukan 6 Vdc
- Motor Servo
Sedangkan untuk bagian motor servo, yaitu sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor. motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer. Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan potensiometer dengan perubahan resistansinya saat motor berputar berfungsi sebagai penentu batas posisi putaran poros motor servo.

- Prinsip Kerja Motor Servo
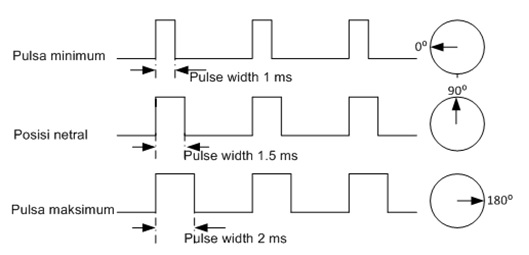
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam). Lebih jelasnya perhatikan grafik dibawah ini.
Sementara untuk rangkaian schematic dan tampilan rangkaiannya adalah sebagai berikut.
Rangkaian Servo Controller

Rangkaian Schematic pada Software Eagle

Rangkaian Board pada Software Eagle

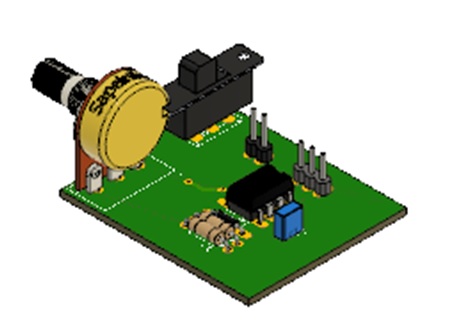
Tampilan 3D pada Software Fusion 360

Percobaan simulasi pada Software Proteus

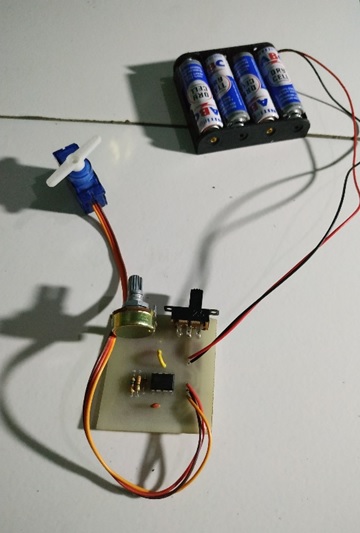
Hasil Keseluruhan
Adapun susunan komponennya adalah sebagai berikut.
- 1 resistor 56000Ω
- 1 resistor 3300000Ω
- 1 resistor variable 100000Ω
- 1 Kapasitor Non-polar 22nF
- 1 Dioda 1N4148
- 1 IC NE555
- 1 Switch 255SB
- 4 Baterai 1,5 V
- Servo SG-90
Proses Pembuatan PCB
- Buat rangkaian boardnya
- Print rangkaian yang telah dibuat
- Olesi permukaan PCB menggunakan minyak (Hand Body atau sejenisnya)
- Tempelkan layout PCB ke permukaan PCB yang telah diolesi minyak tadi, lalu setrika hingga kurang lebih 10 menit
- Larutkan PCB hasil penyetrikaan dengan menggunakan larutan HCl ataupun menggunakan FeCl.
- Lubangi setiap lubang kaki yang ada pada board PCB menggunakan bor
- Pasang komponen sesuai board.
- Kaitkan dengan board PCB menggunakan solder.
Gimana? Cukup mudah bukan? Rangkaian ini juga bisa digunakan untuk mencoba kelayakan servo saat mau beli lho. Jadi kita bisa tau, servo yang mau kita beli itu masih layak pakai atau tidak.
Disusun oleh Hilmy Rahmansyah Baskoro (19/441159/SV/16511)