Simulasi Robot Line Follower dibuat menggunakan MATLAB dan bertujuan untuk meniru cara kerja robot dua roda dalam mengikuti garis. Simulator ini terdiri dari beberapa file utama, yaitu lineFollowerGUI.m untuk membuat tampilan antarmuka (GUI) yang memungkinkan pengguna mengatur nilai PID (Kp, Ki, Kd), memilih posisi awal robot, menjalankan simulasi, serta melihat grafik error, sinyal koreksi, dan status sensor.
File runLineFollower.m berisi logika utama pergerakan robot. Untuk menampilkan robot yang berputar sesuai arah geraknya, digunakan file drawRotatedImage.m. Folder ini juga berisi gambar-gambar pendukung. Untuk menguji simulasi, dibuat lintasan pada matlab sebagai berikut:
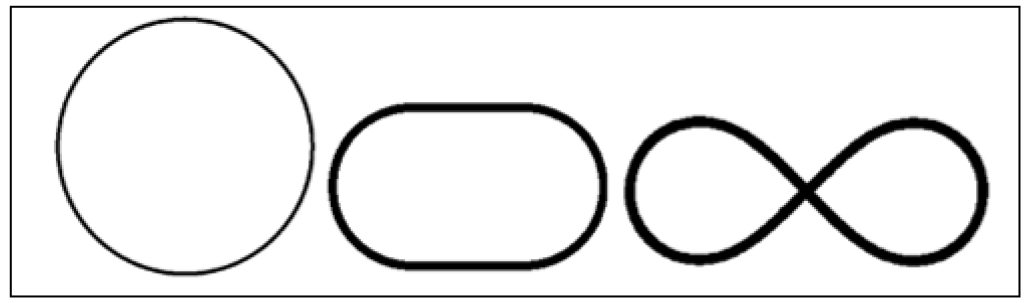
Simulasi menggunakan lintasan berbentuk lingkaran, oval, dan angka delapan bertujuan untuk menguji kemampuan robot line follower dalam menghadapi berbagai jenis jalur. Lintasan lingkaran berfungsi mengamati kestabilan saat berbelok secara konstan, oval menguji kemampuan transisi antara jalur lurus dan lengkung, sedangkan angka delapan menantang robot untuk merespons perubahan arah kanan dan kiri secara terusmenerus. Ketiga lintasan ini membantu mengevaluasi keakuratan sensor serta efektivitas kendali PID. Jika robot mampu mengikuti semuanya dengan baik, berarti sistem kendali telah berfungsi dengan baik dan responsif. Selain itu, pada simulator ini juga diujikan lintasan kompleks seperti pada gambar berikut:
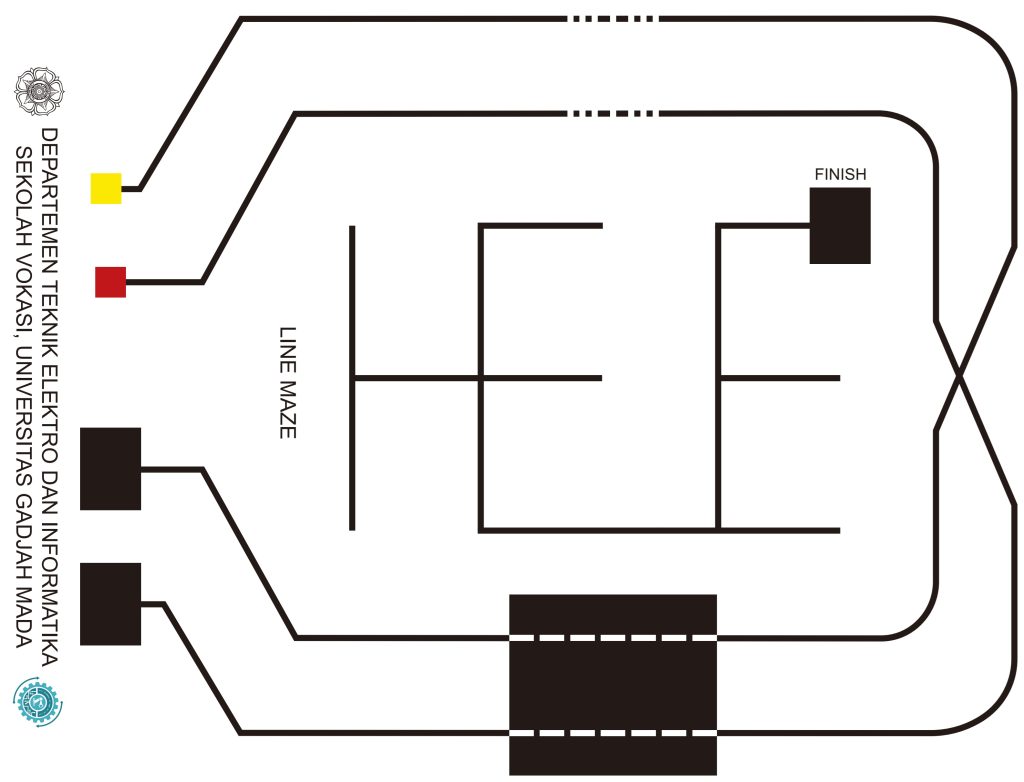
Lintasan line follower tersebut berfungsi sebagai media pengujian dalam simulasi untuk mengevaluasi kemampuan robot mengikuti garis secara stabil dan akurat. Dengan bentuk jalur yang beragam, simulasi ini membantu mengamati respons sistem kendali PID dan sensor dalam mempertahankan posisi robot di atas garis. Lintasan ini penting sebagai langkah awal sebelum sistem diterapkan ke robot fisik.
Untuk cara kerja program lebih lanjut, ditunjukan pada flowchart berikut:
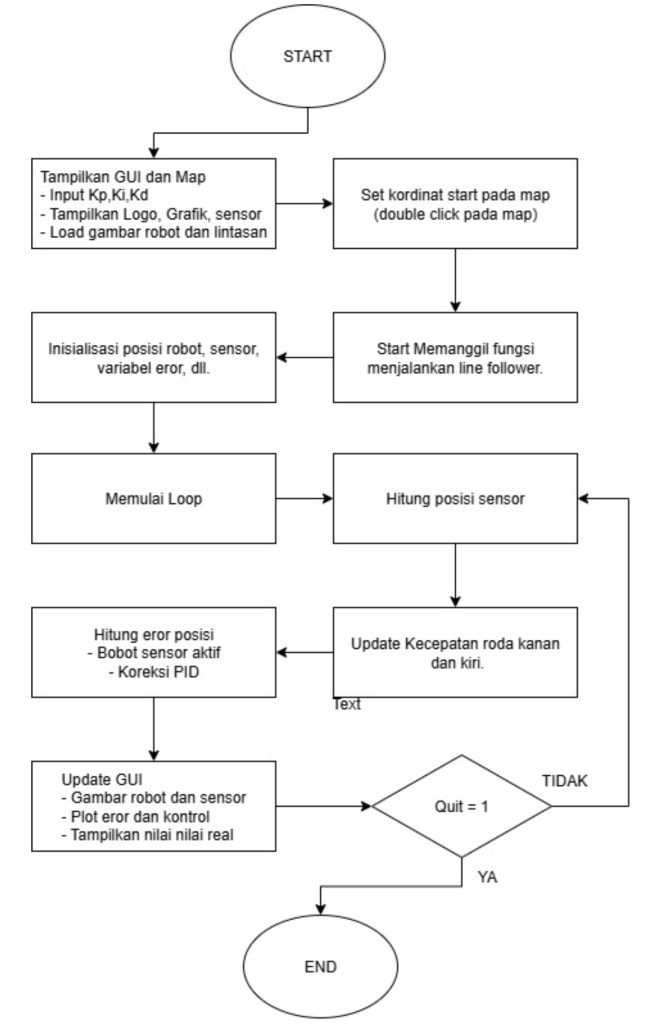
Diagram tersebut menunjukkan proses kerja program robot line follower menggunakan GUI dan kendali PID. Program diawali dengan menampilkan antarmuka pengguna, menerima input parameter kontrol, serta memuat peta dan lintasan. Setelah pengguna menentukan posisi awal robot, sistem mulai menjalankan fungsi line follower dan melakukan inisialisasi data. Program kemudian masuk ke proses berulang, di mana sensor dibaca, error posisi dihitung, koreksi PID diterapkan, kecepatan roda disesuaikan, dan tampilan GUI diperbarui secara dinamis. Proses ini berlangsung terus hingga perintah berhenti diberikan, lalu program diakhiri.
Ditulis oleh Naufal Najib (23/514988/SV/22447), 02 Juli 2025
