Dalam upaya mendukung pencapaian Sustainable Development Goals (SDGs), khususnya pada tujuan Industri, Inovasi, dan Infrastruktur (SDG 9), penelitian terkait sistem navigasi robotik terus dikembangkan untuk menciptakan teknologi yang efisien dan cerdas. Salah satu inovasi yang menarik perhatian adalah penerapan metode RGBD SLAM (Simultaneous Localization and Mapping) dalam pemetaan posisi mobile robot menggunakan kamera Kinect. Teknologi ini memungkinkan robot untuk mengenali lingkungan secara tiga dimensi dan menentukan posisinya secara real-time tanpa bantuan sistem penanda eksternal.
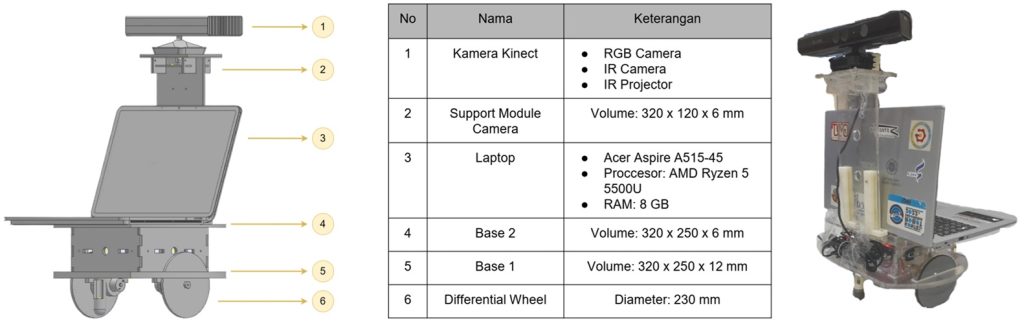
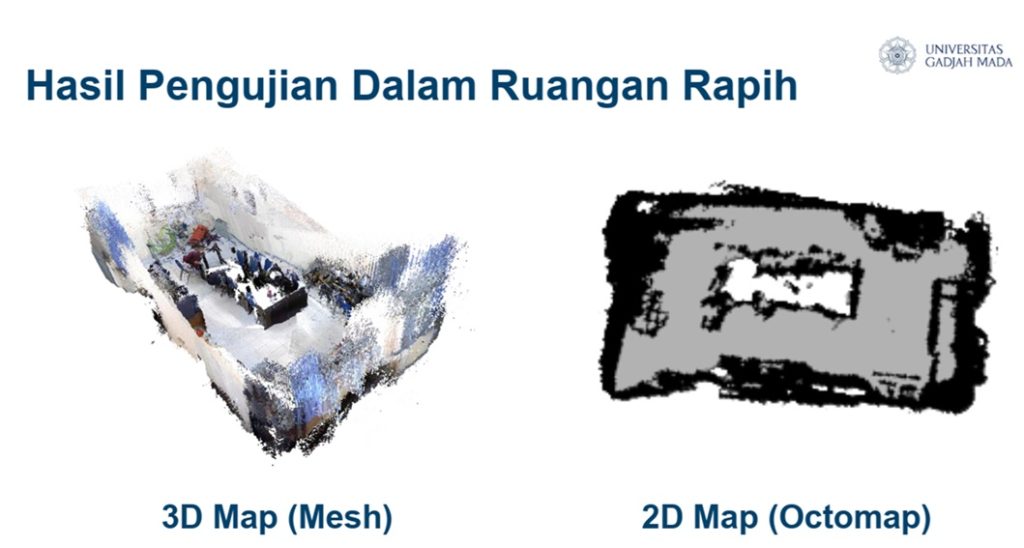
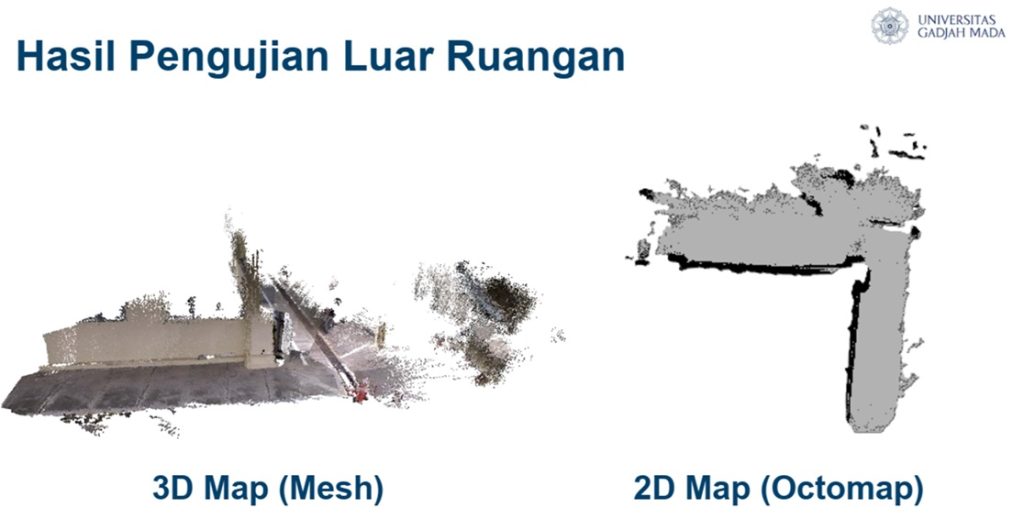
Metode RGBD SLAM memanfaatkan data visual (Red-Green-Blue) serta informasi kedalaman (Depth) dari kamera Kinect. Dengan kombinasi ini, robot dapat membangun peta lingkungan sekaligus memperkirakan lokasinya dengan tingkat akurasi yang tinggi. Data kedalaman yang dihasilkan dari sensor inframerah pada Kinect membantu robot mendeteksi jarak antar objek dan menghindari tabrakan. Teknologi ini sangat relevan dalam pengembangan sistem otonom yang hemat biaya dan mudah diimplementasikan untuk berbagai kebutuhan, seperti logistik, eksplorasi ruang, maupun layanan publik.
Penelitian ini juga memperlihatkan peran penting Artificial Intelligence (AI) dan Computer Vision dalam mendukung pembangunan berkelanjutan. Dengan kemampuan SLAM yang ditingkatkan, robot dapat beroperasi secara mandiri di lingkungan kompleks, seperti gedung bertingkat atau area industri. Hal ini tidak hanya meningkatkan efisiensi operasional, tetapi juga mengurangi risiko kecelakaan kerja dan ketergantungan pada tenaga manusia di area berbahaya.
Selain aspek teknis, penerapan teknologi RGBD SLAM juga memiliki dampak sosial dan ekonomi. Dalam konteks pendidikan tinggi dan riset, pengembangan sistem pemetaan berbasis robot ini menjadi sarana pembelajaran interdisipliner yang menggabungkan bidang teknik elektro, informatika, dan mekatronika. Mahasiswa dan peneliti dapat memanfaatkan sistem ini sebagai platform riset terbuka untuk mengembangkan algoritma navigasi yang lebih adaptif terhadap lingkungan dinamis.
Dengan terus dikembangkannya teknologi pemetaan posisi mobile robot menggunakan RGBD SLAM dan kamera Kinect, diharapkan Indonesia dapat memperkuat kapasitas riset dan inovasinya di bidang robotika. Inovasi ini tidak hanya berkontribusi terhadap kemajuan teknologi nasional, tetapi juga mendukung visi SDGs dalam menciptakan industri yang tangguh, inovatif, dan berkelanjutan untuk masa depan yang lebih cerdas.
Supported by