Di Indonesia istilah tunanetra lebih dikenal dengan sebutan buta karena merujuk pada arti kata blind (buta total). Pernahkah kalian bertemu dengan individu Tunanetra? Ataukah justru berada dekat dengan kalian? Pernahkah kalian bertanya-tanya bagaimana pendampingan yang paling tepat terhadap individu tersebut? Pendampingan yang paling tepat dilakukan pertama kali adalah memberikan pengenalan kepada individu netra terhadap lingkungan sekitar. Pengenalan terhadap lingkungan sekitar membutuhkan beberapa sarana dan prasarana yang dapat membantu mempermudah pemahaman.
Alat bagi penyandang tunanetra ini sangat berguna untuk pengenalan terhadap lingkungan sekitar. Sensor yang digunakan mempermudah mendeteksi jarak penghalang atau sesuatu yang mempersulit keadaan tunanetra. Ingin mengetahui lebih lanjut? Dibawah ini merupakan penjelasannya.
Alat dan Bahan (Mekanis)
- Tongkat, Tongkat merupakan bahan utama yang digunakan sebagai media bantu untuk memudahkan pengguna dalam melakukan kegiatan sehingga dapat mengenali kondisi di sekitar, serta sebagai tempat meletakkan komponen-komponen yang elektronis maupun mekanis yang lain.
- Roda Gila, Roda gila merupakan komponen mekanis yang dapat bergerak ke segala arah, digunakan sebagai alat bantu gerak tongkat sehingga ketika pengguna menggunakan alat ini tidak membutuhkan tenaga yang lebih besar karena pengguna hanya perlu mendorong tongkat.
- Baut dan Mur, Baut dan Mur digunakan untuk menghubungkan beberapa komponen menjadi satu sehingga kompone-komponen yang disatukan dapat terikat kencang. Baut dan mur disini digunakan untuk menghubungkan antara roda gila dan ujung tongkat yang telah dilubangi.
- Holder Baterai, Holder baterai merupakan dudukan atau tempat meletakkan baterai 9 volt untuk terhubung ke komponen elektronis sehingga baterai dapat dipasang atau dilepas dengan mudah.
- Saklar Geser, Saklar geser digunakan untuk tujuan-tujuan yang sama dengan penggunaan salkar toggle, namun jenis ini dioperasikandengan menggunakkan sebuah kenop geser.
Elektronis
Arduino Uno, Arduino Uno adalah board mikrokontroler berbasis ATmega328 (datasheet). Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk menjalankannya.
Pada tongkat tunanetra, arduino uno digunakan sebagai sistem kontrol yang meliputi hasil pembacaan sensor jarak dan delay untuk bunyi buzzer.
Spesifikasi Arduino Uno
- Mikrokontroler ATmega328
- Catu Daya 5V
- Teganan Input (rekomendasi) 7-12V
- Teganan Input (batasan) 6-20V
- Pin I/O Digital 14 (dengan 6 PWM output)
- Pin Input Analog 6
- Arus DC per Pin I/O 40 mA
- Arus DC per Pin I/O untuk PIN 3.3V 50 mA
- Flash Memory 32 KB (ATmega328) dimana 0.5 KB digunakan oleh bootloader
- SRAM 2 KB (ATmega328)
- EEPROM 1 KB (ATmega328)
- Clock Speed 16 MHz
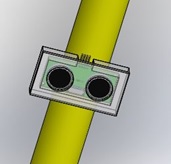
Sensor HC-SR04, Sensor HC-SR04 adalah sensor pengukur jarak berbasis gelombang ultrasonik. Prinsip kerja sesnsor ini pirip dengan radar ultrasonik. Gelombang ultrasonik di pancarkan kemudian di terima balik oleh receiver ultrasonik. Jarak antara waktu pancar dan waktu terima adalah representasi dari jarak objek.
Spesifikasi:
- Jangkauan deteksi: 2cm sampai kisaran 400 -500cm
- Sudut deteksi terbaik adalah 15 derajat
- Tegangan kerja 5V DC
- Resolusi 1cm
- Frekuensi Ultrasonik 40 kHz
- Dapat dihubungkan langsung ke kaki mikrokontroler
Alat ini memiliki 4 pin, pin Vcc, Gnd, Trigger, dan Echo. Pin Vcc untuk listrik positif dan Gnd untuk ground-nya. Pin Trigger untuk trigger keluarnya sinyal dari sensor dan pin Echo untuk menangkap sinyal pantul dari benda.
Cara menggunakan alat ini yaitu: ketika kita memberikan tegangan positif pada pin Trigger selama 10uS, maka sensor akan mengirimkan 8 step sinyal ultrasonik dengan frekuensi 40kHz. Selanjutnya, sinyal akan diterima pada pin Echo. Untuk mengukur jarak benda yang memantulkan sinyal tersebut, maka selisih waktu ketika mengirim dan menerima sinyal digunakan untuk menentukan jarak benda tersebut. Rumus untuk menghitung jarak benda
S = 340.t/2
Dimana S merupakan jarak antara sensor ultrasonik dengan benda (bidang pantul), dan t adalah selisih antara waktu pemancaran gelombang oleh transmitter dan waktu ketika gelombang pantul diterima receiver.
Baterai (Battery)
Baterai (Battery) adalah sebuah alat yang dapat merubah energi kimia yang disimpannya menjadi energi Listrik yang dapat digunakan oleh suatu perangkat Elektronik. Baterai memiliki tiga bagian, anoda (-), katoda (+), dan elektrolit. Katoda dan anoda (sisi positif dan negatif pada kedua ujung baterai tradisional) dihubungkan ke sirkuit listrik. Baterai yang digunakan pada tongkat tunanetra ada 2 yaitu baterai 9V dan 12V. Baterai dengan kapasitas 9V digunakan sebagai catu daya bagi arduino UNO sedangkan baterai kapasitas 12 V digunakan untuk supply daya lampu led.
Saklar atau switch
Saklar atau switch adalah sebuah alat yang berfungsi sebagai penghubung dan pemutus arus listrik. Dalam rangkaian elektronika dan rangkaian listrik saklar berfungsi untuk menghubungkan dan memutuskan arus listrik yang mengalir dari sumber tegangan menuju beban (output) atau dari sebuah sistem ke sistem lainnya.
berdasarkan jumlah Kontak dan Kondisi yang dimilikinya. Jumlah Kontak dan kondisi yang dimiliki tersebut biasanya disebut dengan istilah “Pole” dan “Throw”. Pole adalah banyaknya Kontak yang dimiliki oleh sebuah saklar sedangkan Throw adalah banyaknya kondisi yang dimiliki oleh sebuah Saklar.
Berikut ini adalah beberapa contoh jenis Saklar Listrik yang digolongkan berdasarkan Pole dan Throw :
- SPST : Single Pole Single Throw, yaitu Saklar ON/OFF yang paling sederhana dengan hanya memiliki 2 Terminal. Contohnya Saklar Listrik ON/OFF pada lampu.
- SPDT : Single Pole Double Throw, yaitu Saklar yang memiliki 3 Terminal. Saklar jenis ini dapat digunakan sebagai Saklar Pemilih. Contohnya Saklar pemilih Tegangan Input Adaptor yaitu 110V atau 220V.
- DPST : Double Pole Single Throw, yaitu saklar yang memiliki 4 Terminal. DPST dapat diartikan sebagai 2 Saklar SPST yang dikendalikan dalam satu mekanisme.
- DPDT : Double Pole Double Throw, yaitu saklar yang memiliki 6 Terminal. DPDT dapat diartikan sebagai 2 Saklar SPDT yang dikendalikan dalam satu mekanisme.
- SP6T : Single Pole Six Throw, yaitu saklar yang memilki 7 Terminal yang pada umumnya berfungsi sebagai Saklar pemilih. Jenis Saklar ini banyak ditemui dalam Rangkaian Adaptor yang dapat memilih berbagai Tegangan Output, misalnya pilihan output 1,5V, 3V, 4,5V, 6V, 9V dan 12V.
Pada tongkat tunanetra digunakan 2 saklar jenis DPTP masing – masing digunakan untuk memutus aliran listrik dari baterai yang menuju lampu LED dan arduino.
Lampu LED
Light Emitting Diode atau sering disingkat dengan LED adalah komponen elektronika yang dapat memancarkan cahaya monokromatik ketika diberikan tegangan maju. LED merupakan keluarga Dioda yang terbuat dari bahan semikonduktor. Warna-warna Cahaya yang dipancarkan oleh LED tergantung pada jenis bahan semikonduktor yang dipergunakannya. Lampu LED yang digunakan pada tongkat tunanetra berfungsi memberikan nyala cahaya sebagai indikasi keberadaan si pengguna tongkat yang notabenya adalah penyandang tunanetra. Warna yang dihasilkan dari LED ini adalah putih karena terbuat dari bahan semikonduktor Gallium Indium Nitride (GaInN).
Cara kerjanya LED hampir sama dengan Dioda yang memiliki dua kutub yaitu kutub Positif (P) dan Kutub Negatif (N). LED hanya akan memancarkan cahaya apabila dialiri tegangan maju (bias forward) dari Anoda menuju ke Katoda.
Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loud speaker, buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer pada tongkat tuna netra digunakan sebagai indikator bahwa proses pembacaan sensor HCSR yang berupa jarak terhadap suatu objek telah terindentifikasi dan akan menghasilkan bunyi sesuai dengan pengaturan yang telah diberikan dalam program arduino.
Cara Pembuatan
- Persiapkan alat dan bahan yang dibutuhkan.
- Lubangi ujung tongkat sebagai tempat masuk baut.
- Satukan antara tongkat dengan roda gila menggunakan baut dan mur.
- Input program yang telah dibuat ke Arduino.
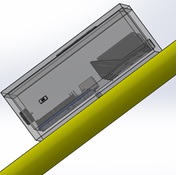
- Rekatkan Arduino dan battery holder ke kotak/rumah komponen menggunakan double tape tebal.
- Masukkan buzzer dan saklar ke kotak yang telah dilubangi.
- Lem bagian belakang kotak rumah komponen ke tongkat dengan kuat.
- Masukkan sensor ke kotak pelindung dan rekatkan pada tongkat bagian bawah dengan lem.
- Hubungkan antara Arduino ke komponen elektronis dan mekanis menggunakan jumper sesuai dengan pin pada program yang telah dibuat.
- Rekatkan jumper yang terhubung dari arduino ke sensor gerak menggunakan tape agar terlihat rapi dan jumper tidak terlepas.
- Uji coba alat.



Penjelasan Program
Berikut adalah program yang kami gunakan untuk membuat Prototype Tongkat Tuna Netra ini.
[code]
#define echopin 9;
#define trigpin 10;
#define buzzer 11;
void mainkanNada(int nada)
{
for(int i=0; i<60; i++)
{ digitalWrite(11, HIGH);
delayMicroseconds(nada);
digitalWrite(11, LOW);
delayMicroseconds(nada);}
delayMicroseconds(60);
}
int freqs[] = {1915};
void setup()
{
pinMode(9, INPUT);
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
digitalWrite(11, LOW);
Serial.begin(9600);
}
void loop()
{
float durasi, jarak;
digitalWrite(10, LOW);
delayMicroseconds(2);
digitalWrite(10, HIGH);
delayMicroseconds(10);
digitalWrite(10, LOW);
durasi = pulseIn(9, HIGH);
jarak = durasi*0.034/2;
if(jarak<100&&jarak>50) {mainkanNada(freqs[0]); delay(50);}
else if(jarak<20) {mainkanNada(freqs[0]); delayMicroseconds(2);}
}
[/code]
Berikut adalah penjelas dari program diatas
” #define echopin 9;
#define trigpin 10;
#define buzzer 11; “
Deklarasi diatas digunakan untuk mendeklarasikan pin yang akan digunakan untuk pin echo dan pin trig dari sensor HC-SR04 serta untuk mendeklarasikan pin positif dari buzzer.
“ void mainkanNada(int nada)
{
for(int i=0; i<60; i++)
{digitalWrite(11, HIGH);
delayMicroseconds(nada);
digitalWrite(11, LOW);
delayMicroseconds(nada);}
delayMicroseconds(60);
}
int freqs[] = {1915}; “
Fungsi diatas digunakan untuk menuntukan nada yang akan dkeluarkan oleh buzzer. Selain itu dalam program kami, jika tidak menggunakan fungsi ini maka delay pada buzzer tidak akan terbaca sehingga kita tidak akan mengetahui perkiraan jarak benda yang berada di depan kita.
“ void setup()
{
pinMode(9, INPUT);
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
digitalWrite(11, LOW);
Serial.begin(9600);
}”
Void setup digunakan untuk mendeklarasikan pin yang digunakan sebagai output, input, dan keadaan awal dari masing masing pin yang digunakan. Pada fungsi ini terdapat Serial.begin yang berfungsi untuk mengatur kecepatan transmisi data (baud rate), pada program ini digunakan baud rate sebesar 9600.
“ void loop()
{
float durasi, jarak;
digitalWrite(10, LOW);
delayMicroseconds(2); “
Fugsi ini digunakan untuk mereset sensor HC-SR04 agar pembacaan dari sensor tersebut menjadi lebih efektif.
“ digitalWrite(10, HIGH);
delayMicroseconds(10);
digitalWrite(10, LOW); “
Pada bagian ini digunakan untuk mengeset pin trig menjadi HIGH/aktif selama 10 microseconds, ini digunakan agar pin trig dapat membaca pantulan gelombnag yang sebelumnya telah dikirim oleh pin echo. Delay dibuat dalam satuan microseconds agar pembacaan sensor lebih cepat sehingga alat akan menjadi lebih responsive.
“ durasi = pulseIn(9, HIGH);
jarak = durasi*0.034/2; “
Pada bagian ini digunakan untuk mengkonversi hasil pembacaan dari sensor pin trig menjadi data jarak yang natinya akan digunakan untuk mengaktifkan buzzer. Durasi darifungsi diatas adalah lama waktu yang dibutuhkan untuk gelombang ultrasonic yang dipancarkan pin echo dapat diterima oleh pin trig kemudian durasi tersebut dikalikan dengan kecepatan cahaya yang bernilai 340m/s yang kemudian dikonversi menjadi 0.034cm/ms agar data yang didapatkan mempunyai satuan cm, angka 2 digunakan sebagai pembagi karena gelombang yang dipancarkan berbolak balik sehingga digunakan pembagi dua untuk mentukan jaraknya.
“ if (jarak<100&&jarak>50) {mainkanNada(freqs[0]); delay(50);}
else if(jarak<50) {mainkanNada(freqs[0]); delayMicroseconds(2);}
} “
Fungsi logika diatas digunakan untuk menentukan bagaimana bunyi dari buzzer yang dapat digunakan sebagai perkiraan jarak antara benda dengan kita. Pada program ini apabila benda berjarak antara 50cm hingga 100cm dari kita maka buzzer akan memainkan nada dengan frekuwensi 1915(do) dengan delay sebesar 50miliseconds, jika benda berada pada jarak dibawah 50cm dari kita maka delay akan berubah menjadi 2microseconds. Jadi jika kita semakin denkat dengan benda maka bunyi buzzer akan semakin cepat tetapi jika kita menjauh maka bunyi buzzer akan semakin cepat.
Disusun oleh:
Jihan Sukma Mila (17/411112/SV/13039)
Kurnia Putra Pratama (17/411114/SV/13041)
Ardi Susilo (17/416760/SV/14498)
Nabil Ridho S (17/416806/SV/14544)