Jumlah pengendara mobil di Indonesia semakin meningkat dari tahun ke tahun. Tentu saja, hal tersebut menyebabkan banyak problematika yang hadir, salah satunya adalah padatnya lahan parkir baik di dalam maupun di luar gedung parkir. Kita sering mengalami terjebak di lahan parkir akibat sulit menemukan tempat parkir. Hal tersebut tentu saja hanya akan membuang-buang waktu dan uang karena sudah terlanjur memasuki area parkir.
Arduino Controlled Gate Barrier with Pressure Pad merupakan solusi untuk mempermudah pengendara mobil maupun motor menemukan tempat parkir. Dengan display yang menunjukkan jumlah ketersediaan tempat parkir yang terpampang di depan pintu masuk, akan meminimalisir kepadatan kendaraan pada area parkir. Adapun jika lahan parkir sudah penuh, palang tidak akan terbuka.
Alat dan Bahan :
- Arduino Uno
- Pressure Pad
- Micrroservo SG-90
- Seven Segment
- Jumper
- Solder dan Timah
- PCB
- Stick
- Triplek
- Kardus
- Mobil Mainan
Step 1 : Wiring Diagram

Step 2 : Program
Program dapat diunduh melalui link di bawah ini :
https://drive.google.com/drive/folders/1yemQWzpc543x8m2x5QH5P98hsCHN-uCF
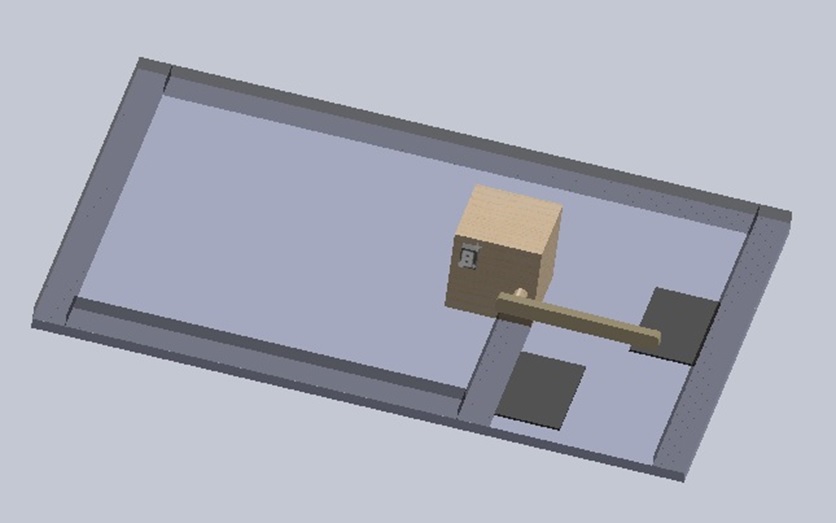
Step 3 : Desain Alat
Berikut adalah desain alat menggunakan solidworks :
Step 4 : Cara Kerja
Cara Kerja dari project tersebut adalah sebagai berikut :
- Sensor pressure pad bekerja membaca pergerakan objek.
- Ketika ada objek mengenai daerah kerja sensor kemudian sensor mengirim sinyal ke Arduino.
- Selanjutnya arduino mengirim sinyal ke servo yang nantinya servo bergerak layaknya sebuah gerbang otomatis.
- Hal tersebut terus berulang dengan batasan jumlah objek yang ditentukan yang ditampilkan pada 7-segment.
- Ketika objek yang melewati sensor telah mencapai batas yang ditentukan,maka servo tidak akan bergerak.
- Ketika objek menuju keluar gerbang makan jumlah space yang tampil pada seven segment akan bertambah dan objek dapat masuk kembali.
Hasil Project
Berikut adalah hasil project yang dibuat :

Kekurangan :
- Belum adanya penampil space yang lebih dari satu digit.
- Palang terbuka menggunakan delay, belum menggunakan sensor.
Kesimpulan
Alat ini menggunakan sensor Pressure Pad sebagai pendeteksi lalu lintas kendaraan yang keluar-masuk. Sensor bekerja dengan mendeteksi tekanan pada permukaan tanah. Namun masih ada kekurangan pada alat ini yaitu palang otomatis masih dikontrol menggunakan fungsi delay pada arduino. Sehingga apabila mobil tidak melewati palang otomatis dalam waktu tiga detik, palang akan tertutup dengan sendirinya.
Saran
Alat ini diimplentasikan pada sistem operasional di area parkir. Bertujuan agar mengetahui kapasitas tempat pada suatu area parker. Akan tetapi masih banyak kekurangan pada alat yang telah dibuat kurang kompleks. Inovasi kedepannya akan dibuat sensor yang lebih bervariasi agar tercipta output atau hasil yang detail dan jelas.
Disusun oleh:
M. Aldi Syam, Nanda Alicia, Achmad Rizal, Oktrin Rahma, Syaeful Ulum
