PLC sesungguhnya merupakan sebuah sistem mikrokontroler khusus untuk keperluan aplikasi dalam dunia industri. Dalam keseluruhan proses industri, PLC dapat digunakan diantaranya pada proses sortir barang hingga pengepakan barang. Proses sortir barang merupakan sebuah proses yang bertujuan untuk memisahkan barang yang tidak sesuai dengan kriteria dari barang yang sudah sesuai standar. Saat ini perkembangan teknologi alat penyortir barang telah berkembang dengan pesat, karena alat ini mempunyai peranan yang sangat penting dalam proses produksi dimana efisiensi waktu dan tenaga, serta keakuratan menjadi faktor yang penting. Mitsubishi FX – PLC trainer adalah software pelatihan, yang bisa digunakan untuk para pemula dalam mempelajari pemrograman PLC merek Mitsubishi. Pada software pelatihan ini terdapat banyak aplikasi PLC di industri dengan 5 kategori mulai dari pemula hingga mahir dengan salah satu pengaplikasiannya yaitu pada penyortiran barang.
Alur cerita proses simulasi
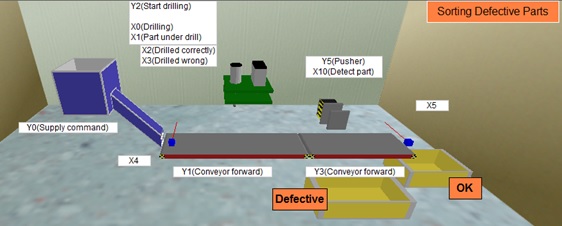
Simulasi secara sederhana sistem penyortiran barang rusak ini dapat dilihat pada Gambar 1. Proses dimulai saat tombol START ditekan sehingga konveyor berjalan. Kemudian saat Push Button ditekan maka Supply command akan mensuplai barang yang akan disortir sehingga barang berjalan di konveyor untuk dicek kondisinya pada peralatan drilling. Pada saat pengecekan, konveyor otomatis berhenti. Terdapat 2 kondisi dimana saat barang dalam keadaan baik ‘OK’ maka akan diteruskan menuju box OK sementara jika ada barang rusak ‘Defective’ maka Pusher secara otomatis mendorong barang menuju box barang-barang rusak. Proses akan terus berulang jika Push Button ditekan.
Tabel I/O
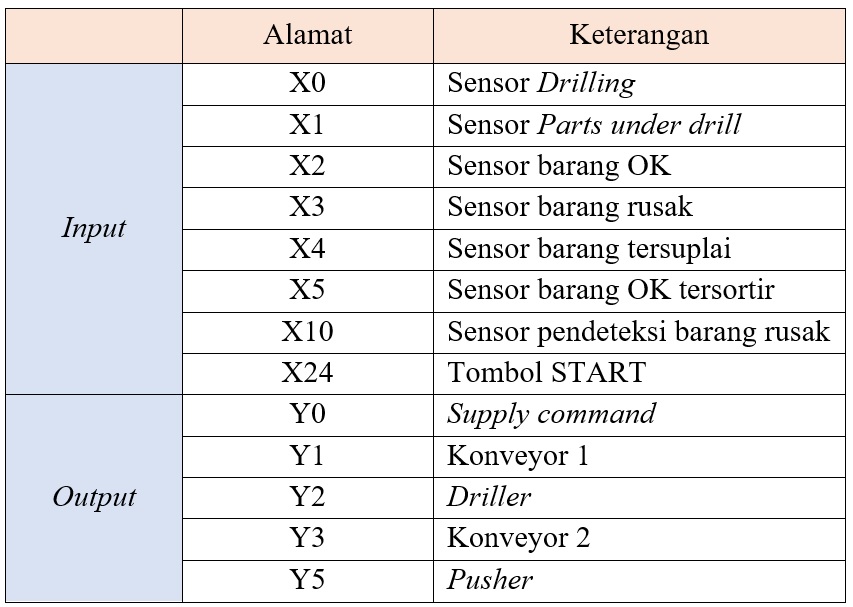
Adapun input dan output yang digunakan pada simulasi penyortiran barang rusak dijelaskan pada tabel berikut:
Model State Diagram
State diagram adalah diagram yang digunakan untuk medeskripsikan perilaku sistem. State diagram berguna untuk memetakan cara kerja atau langkah-langkah dari program yang akan dibuat. Serta untuk mengetahui proses dari program tersebut dengan cara menentukan input, output, dan alamatnya program yang akan dibuat.
Adapun rumus state diagram yang digunakan pada program pengepakan buah jeruk dengan PLC adalah sebagai berikut :
T = ST_Sebelum • Perubahan_Sensor
ST = ( ST + T_masuk) • T_keluar’
Keterangan :
T = Transisi
ST = State/Kondisi
Berikut merupakan model state diagram dari aplikasi penyortiran barang rusak.
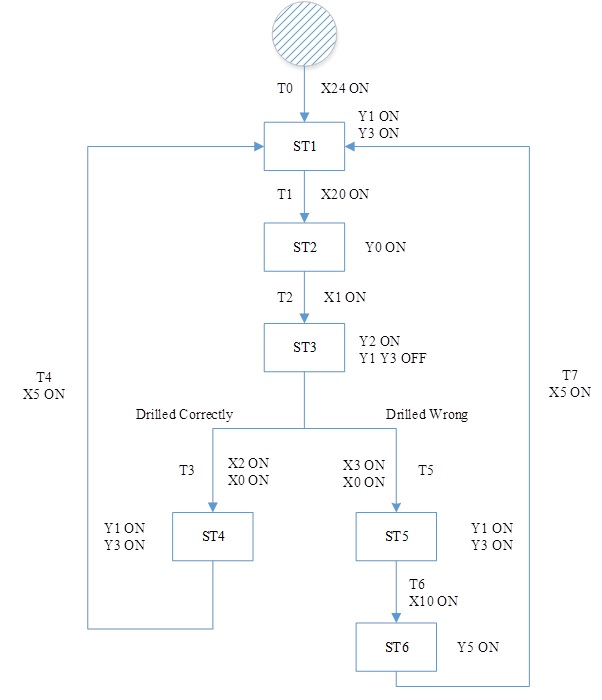
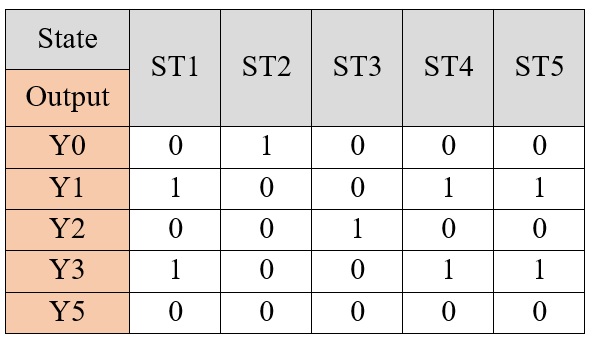
Berdasarkan diagram state di atas diperoleh persamaan sebagai berikut:
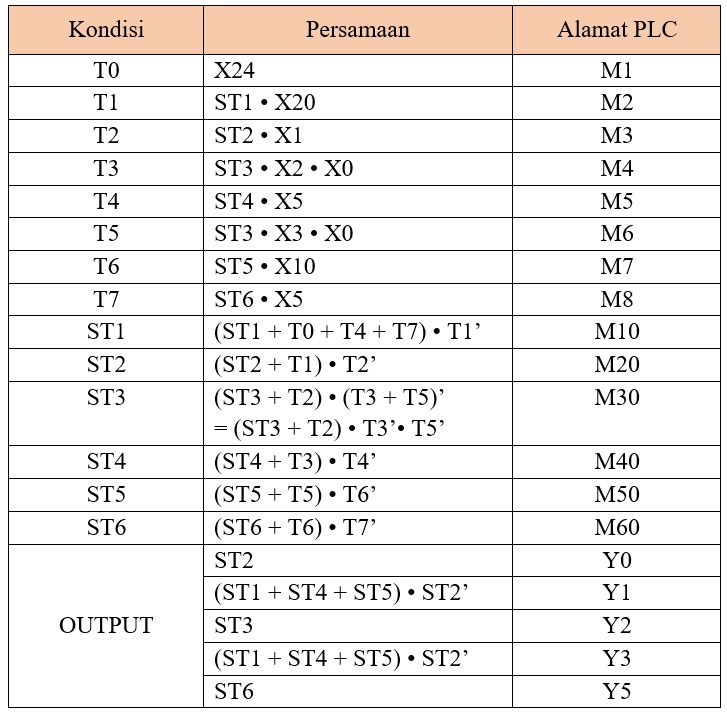
Tabel kebenaran output:
Langkah Perancangan Simulasi FX-trainer
- Buka software FX-Trainer

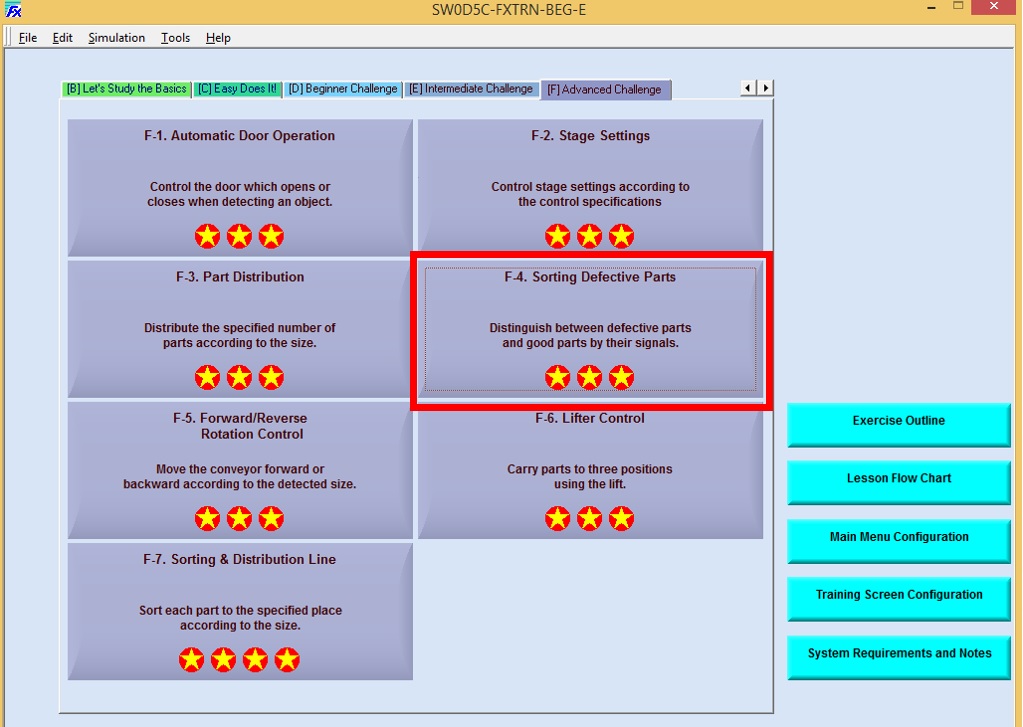
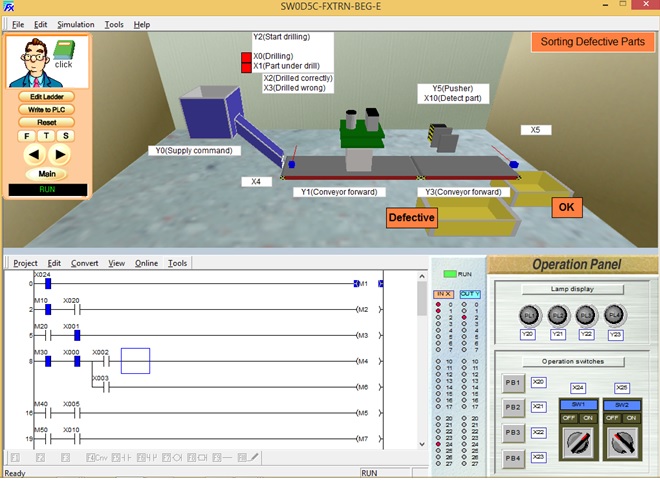
- Pada tampilan awal FX-Trainer akan muncul pilihan 5 kategori. Pilih kategori Advanced Challenge : F-4. Sorting Defective Parts.
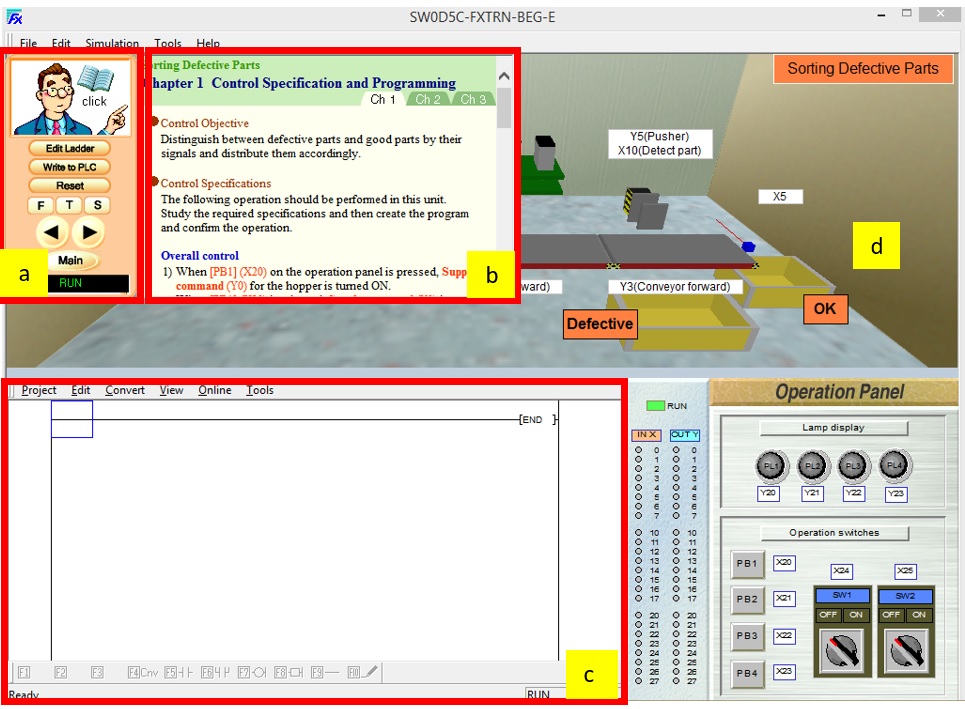
- Kemudian akan muncul tampilan seperti di bawah. Terdapat 4 bagian utama pada simulasi FX-Trainer, yaitu a) Menu Utama b) Petunjuk Instruksi c) Ladder Diagram d) Simulator
- Untuk dapat membuat ladder diagram, klik Edit Ladder.
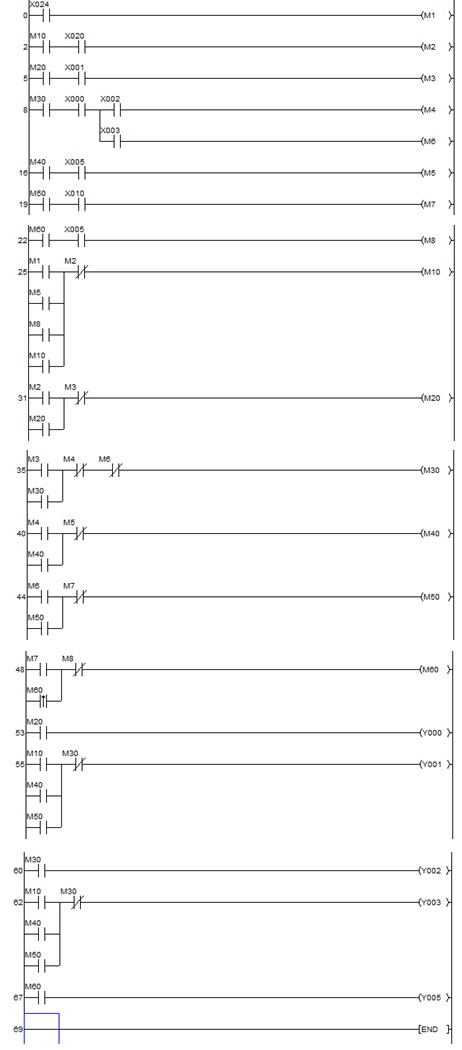
- Buat ladder diagram berdasarkan persamaan state diagram yang telah dibuat pada kolom Ladder.
- Setelah ladder selesai dibuat, simulasikan program dengan klik Convert (F4) kemudian Write to PLC. Program akan dikirim ke PLC.
- Simulasikan program dengan menekan tombol START (X24) terlebih dahulu kemudian PB1 (X20) untuk mensuplai barang yang akan disortir.
Penjelasan Cara Kerja
Berdasarkan ladder diagram di atas, proses dimulai saat tombol START (X24) ditekan sehingga konveyor (Y1 dan Y3) berjalan. Kemudian saat PB1 (X20) ditekan maka Supply command (Y0) akan mensuplai barang yang akan disortir sehingga barang berjalan di konveyor. Sensor X4 berfungsi sebagai sensor barang telah tersuplai. Pengecekan barang dilakukan pada peralatan drilling (Y2). Pada saat pengecekan, konveyor otomatis berhenti. Saat proses drilling, sensor X0 akan aktif. Terdapat 2 sensor untuk mendeteksi barang dalam keadaan OK atau rusak dimana saat barang dalam keadaan baik ‘OK’ (sensor X2 aktif) maka akan diteruskan menuju box OK. Sementara jika ada barang rusak ‘Defective’ (sensor X3 aktif) maka ketika X10 aktif (terdeteksi barang), pusher (Y5) secara otomatis mendorong barang menuju box barang-barang rusak. Proses akan terus berulang jika PB1 ditekan.
Disusun oleh:
- Fakhrurrozi Zainal A (17/416785/SV/14523)
- Fergi Fherdinand (17/416786/SV/14524)
- Frista Dwi Novita S (17/416787/SV/14525)
- Istiqomah (17/416794/SV/14532)