
Artikel ini mengambil referensi dari International Conference IEEE yang berjudul “Modeling and Simulation for Self-balance System” yang ditulis oleh Sun Jun dan Wan Minglun pada International Conference on Digital Manufacturing & Automation tahun 2010 . Berdasarkan paparan dari paper tersebut, berikut step by step untuk memperoleh state-space model sistem Self Balancing Robot:
- State variable yang dipilih (sistem koordinat)
- Persamaan pada kedua roda
- Persamaan body robot
- Persamaan non-linier
- Linierisasi
Setelah step-step tersebut, maka didapat hasil dari state-space system sebagai berikut:
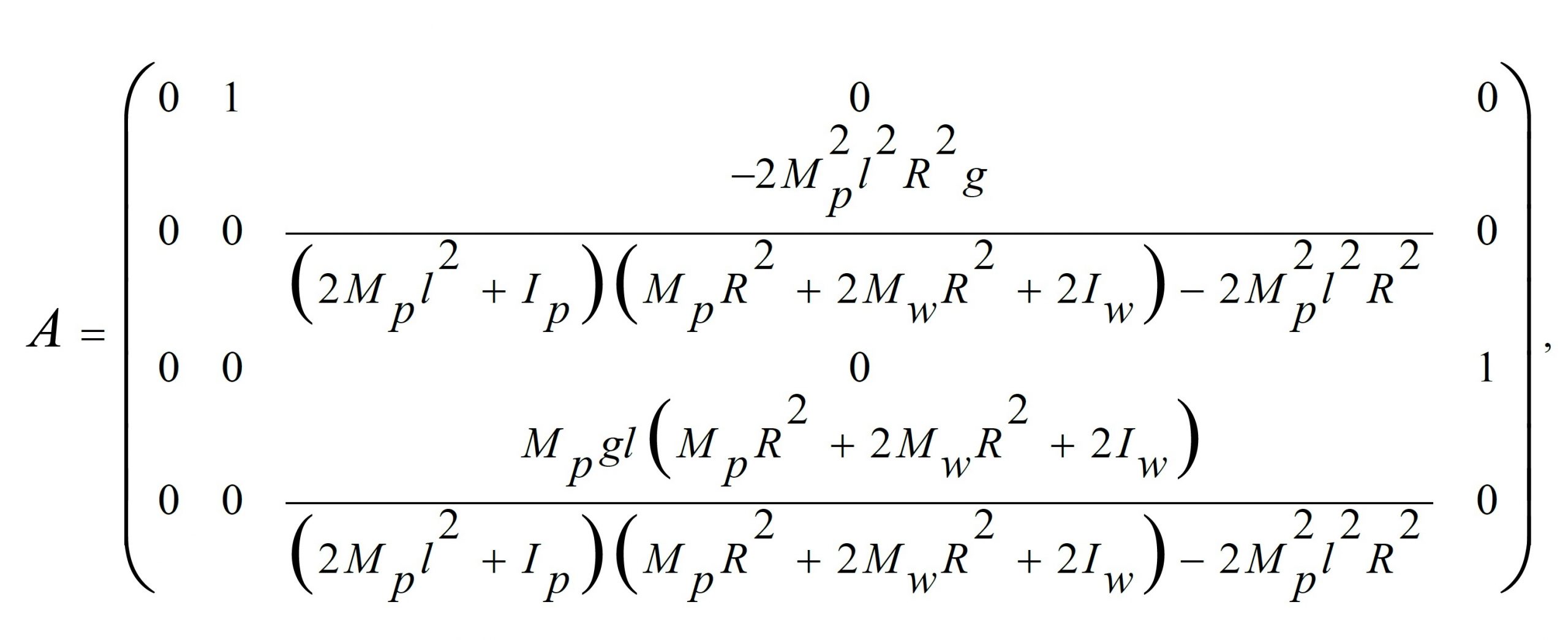
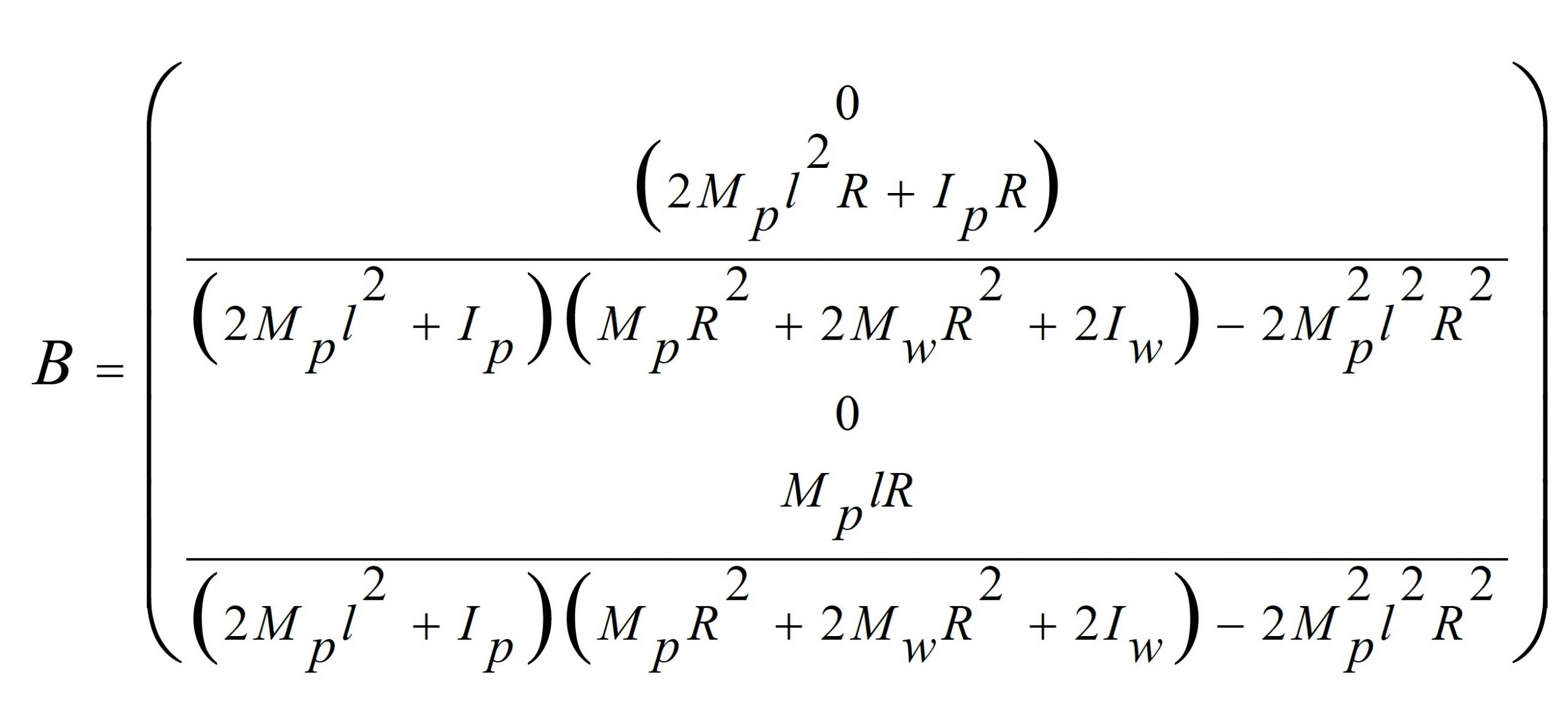

Setelah memperoleh state-space system kita dapat mengaplikasikan kendali LQR.
- Simulasi
Simulasi ini menggunakan MATLAB dan Simulink, dimana MATLAB akan digunakan untuk mencari state feedback gain K yang selanjutnya akan disimulasikan dengan Simulink. Pertama, tentukan terlebih dahulu spesifikasi sistem robot self balancing pada Tabel berikut ini.
| Mp | Mw | l | Ip | Iw | R | g |
| 5.6 kg | 0.25 kg | 0.185 m | 0.0464 kg m2 | 0.00048 kg m2 | 0.07 m | 9.8 m/s2 |

Untuk lebih detailnya dapat dilihat pada video tutorial berikut!
Disusun oleh Panji Senatama (19/450800/SV/17138)