
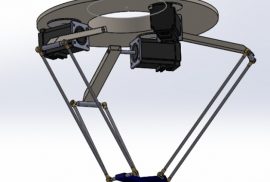
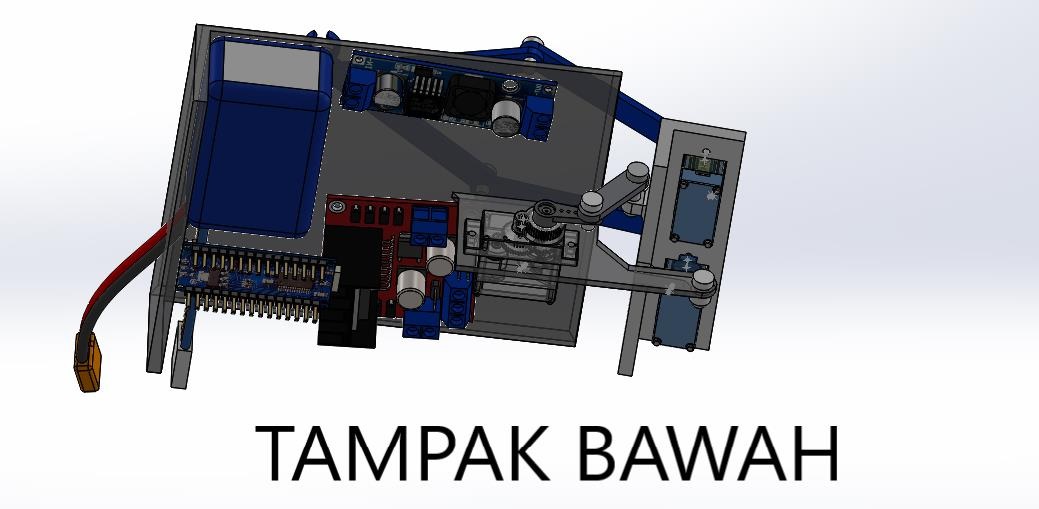
Ball and Beam System adalah sebuah sistem yang terdiri dari sebuah bidang segi empat (beam) dan sebuah bola (ball). Pada dasarnya, Ball and Beam System ini mengedepankan system yang stabil dan seimbang. Pada Ball and Beam terdapat bola yang dapat bergerak bebas dan posisi dari perpindahan bola tersebut dapat diatur sesuai dengan yang diinginkan. Pergerakan bola pada Ball and Beam System dipengaruhi oleh besarnya gaya yang ditimbulkan oleh kemiringan batang tempat bola berada, dimana untuk memiringkan batang digunakan motor yang akan menggerakkan batang tersebut sesuai dengan posisi bola. Karena membutuhkan system yang stabil dan seimbang maka komposisi desain harus proporsional. Dalam mendesain Ball and Beam System ini digunakan software Solidworks. Pada pembuatan desain CAD ini kami mebuatnya dengan referensi dari Youtube dengan judul “PID Control of a Ball and Beam System”.









Recent Comments