Artikel ini mengambil referensi dari International Conference IEEE yang berjudul “Modeling and Simulation for Self-balance System” yang ditulis oleh Sun Jun dan Wan Minglun pada International Conference on Digital Manufacturing & Automation tahun 2010 . Berdasarkan paparan dari paper tersebut, berikut step by step untuk memperoleh state-space model sistem Self Balancing Robot:
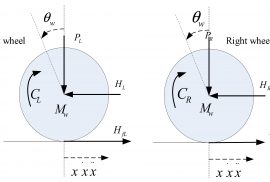
- State variable yang dipilih (sistem koordinat)
- Persamaan pada kedua roda
- Persamaan body robot
- Persamaan non-linier
- Linierisasi
Setelah step-step tersebut, maka didapat hasil dari state-space system sebagai berikut:
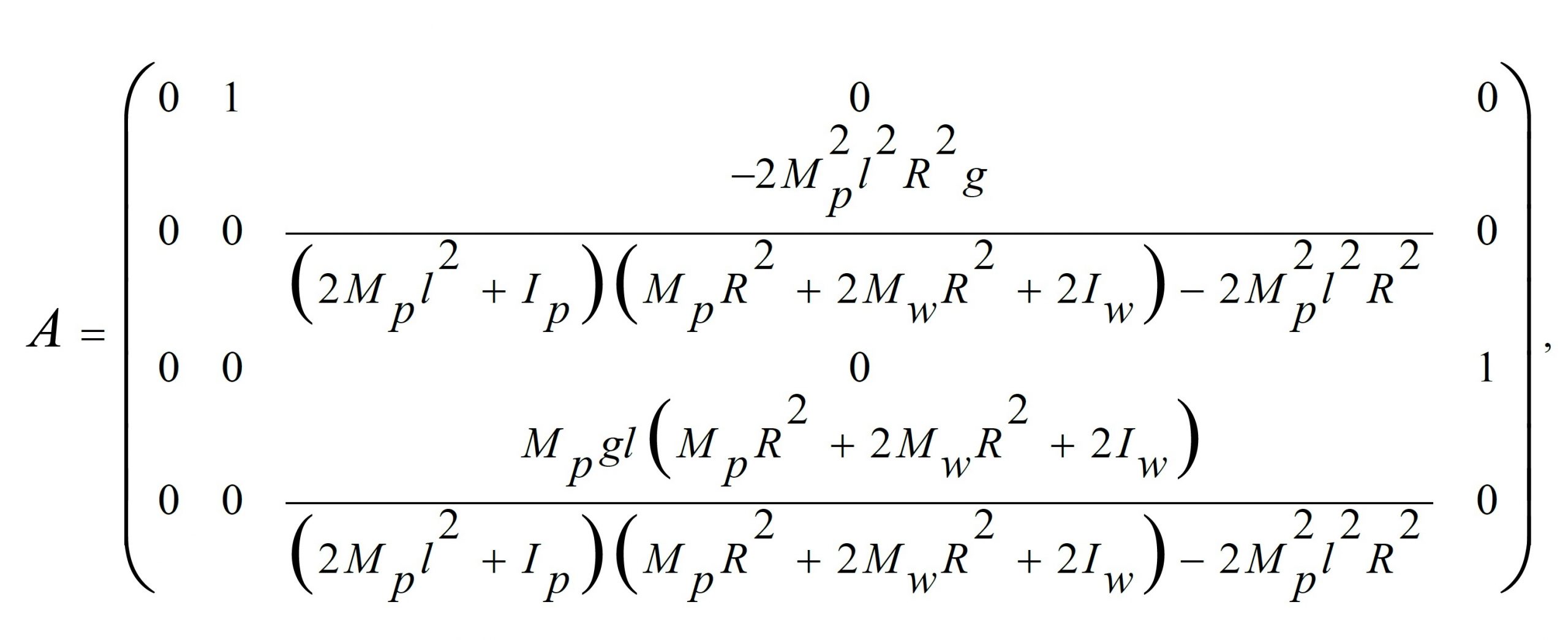
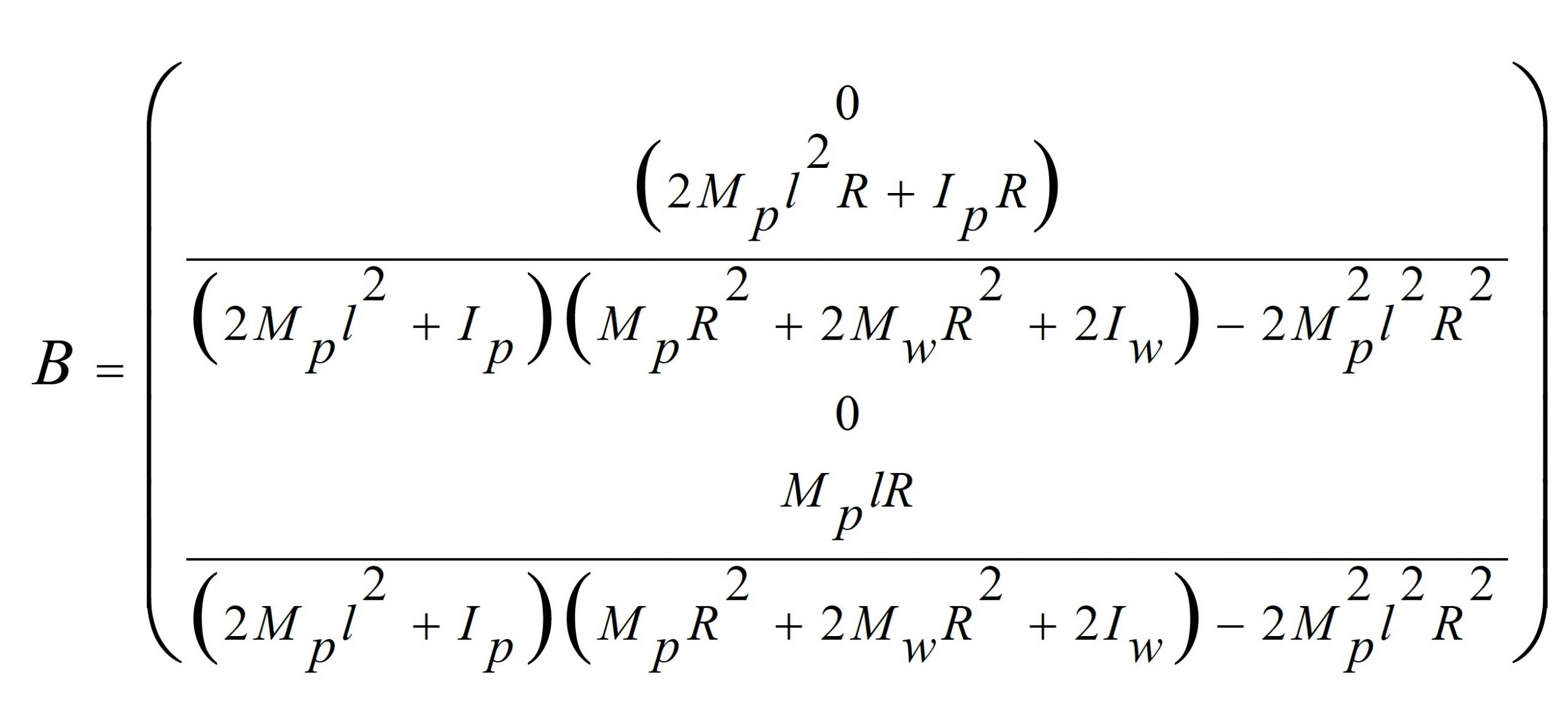

Setelah memperoleh state-space system kita dapat mengaplikasikan kendali LQR.


Recent Comments