Spray boom merupakan penerapan teknologi pada bidang pertanian yang berfungsi untuk melakukan penyemprotan pestisida terhadap tanaman di ladang secara lebih efektif jika dibandingkan dengan cara manual. Dengan pemberian pestisida pada tanaman diharapkan tanaman akan terawat dan terhindar dari hama, sehingga jika dipanen akan menghasilkan kualitas yang terbaik dan secara tidak langsung juga akan meningkatkan harga jualnya.

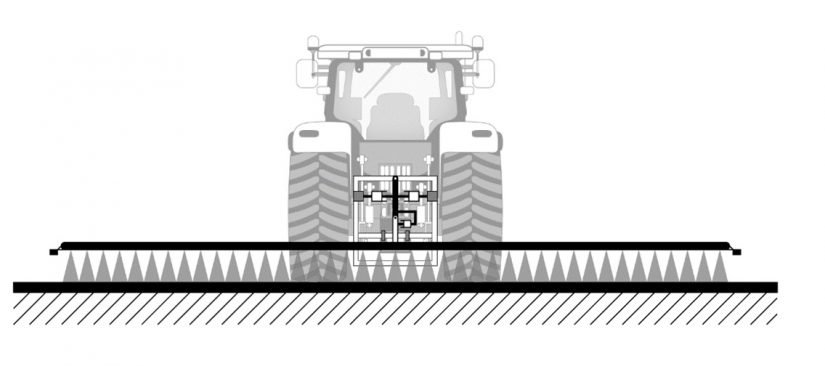
Teknologi ini diterapkan dengan dipasang pada bagian belakang traktor. Secara umum strukturnya terdiri dari pendulum yang berfungsi sebagai penghubung terhadap bingkai pengait pada traktor dengan spray boom, kemudian suspensi pasif berfungsi untuk meredam gerakan dari pendulum, dan spray boom sendiri berfungsi untuk melakukan penyemprotan. Namun dari struktur umum tersebut terdapat 2 masalah yaitu:
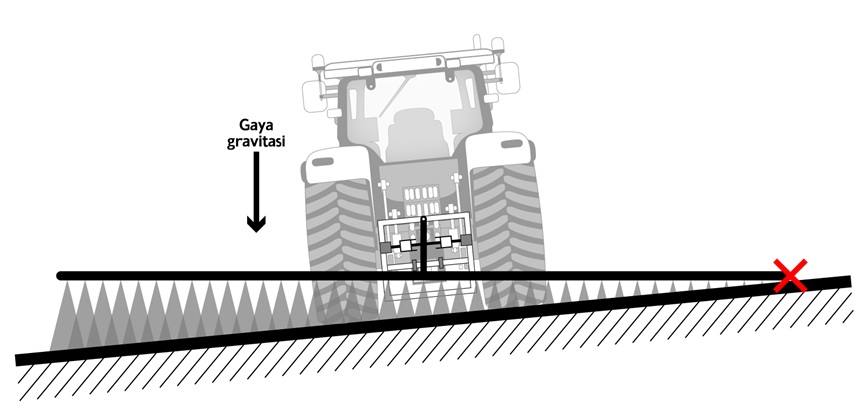
- Prinsip kerja penyeimbangan spray boom yang hanya mengandalkan gaya gravitasi mengakibatkan ketidak sejajaran terhadap permukaan tanah yang memiliki variasi sudut elevasi sehingga akan mempengaruhi distribusi kepadatan pestisida dan secara tidak langsung juga pada kualitas tanamannya.
- Masih pada ketidak kesejajaran tersebut dan dengan peningkatan panjang dari spray boom sekarang dapat mengakibatkan ujung-ujung dari spray boom mengalami kerusakan karena kontak atau bergesek dengan permukaan tanah secara langsung.
Untuk mengatasi permasalahan tersebut dapat diatasi dengan 2 cara yaitu:
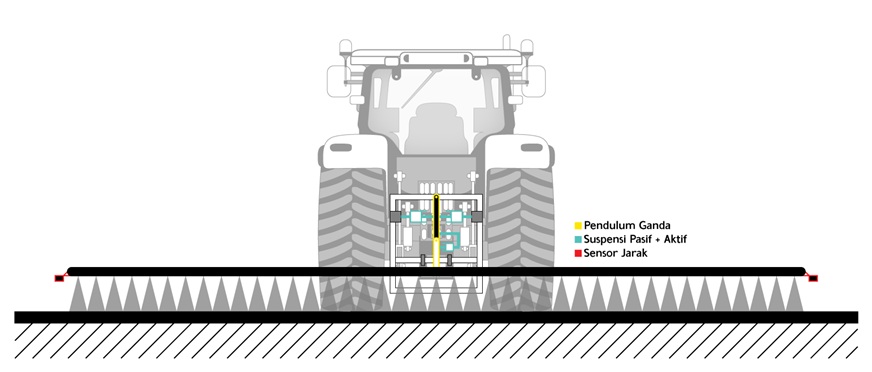
- Pemodifikasian struktur, yaitu yang tadinya hanya terdiri dari pendulum tunggal diubah menjadi pendulum ganda dan yang tadinya hanya terdiri dari suspensi pasif ditambahi dengan suspensi aktif sebagai aktuator untuk memanipulasi gerak pendulum kedua.
- Pemberian teknik kendali, yaitu penerapan teknik kendali untuk mengendalikan aktuator berdasarkan masukan sudut elevasi permukaan tanah yang diperoleh dengan menambahkan sensor jarak di ujung kiri dan kanan spray boom.
Kemudian untuk pemodelan sistem, perancangan kendali, dan simulasi serta pembahasannya secara lengkap dapat dilihat pada video berikut.
Disusun oleh ADHITYA ALVIAN NUGROHO 19/450787/SV/17125