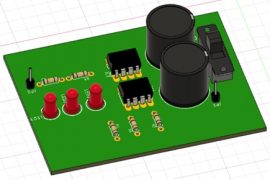
Seperti yang kita ketahui di negara kita, Indonesia adalah negara yang terkenal karena banyaknya jumlah penduduk di dalamnya. Hal ini terlihat dari padatnya penduduk serta banyaknya kendaraan yang dapat dilihat dimana saja di setiap daerah di Indonesia sehingga banyak juga terjadi kemacetan. Tentunya rangkaian lampu merah atau Traffc Light Circuit Design Using IC NE555 ini yang merupakan miniatur dari rangakaian lampu lalu lintas asli yang dapat kita jumpai di persimpangan jalan menjadi salah satu solusi kemacetan yang ada di Indonesia.






Recent Comments