
The dark detector circuit is an electronic circuit used to detect the intensity of light at a place. How does it work? When the light intensity is low, the circuit will work with the output in this circuit is a speaker makes a sound. Vice verse, when the light intensity is high then the speaker will turn off.
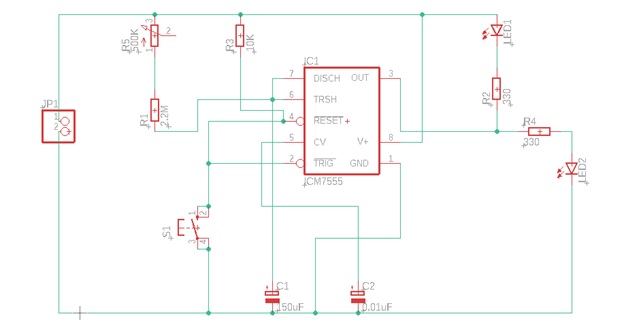
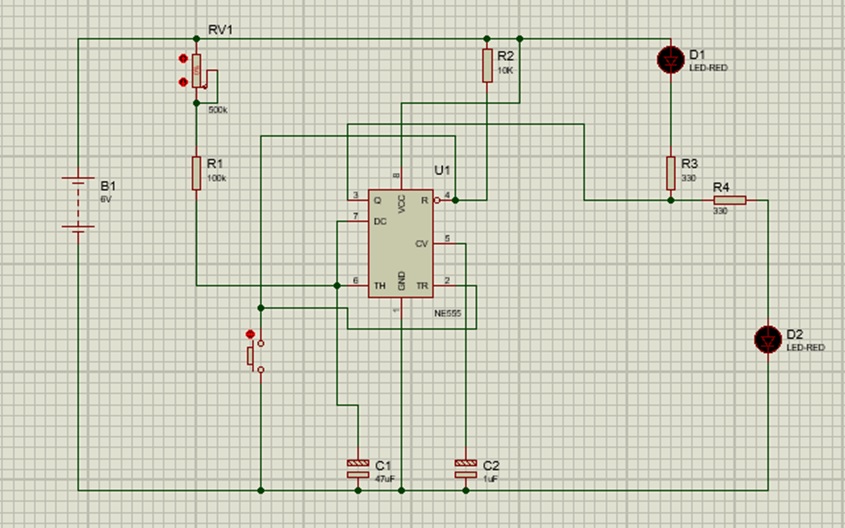
In this dark detector circuit, the 555 timer IC is in astable mode. The activation of the IC is controlled by photoresistor (LDR) and variable resistor (potentiometer). When the resistance of LDR increases and the potentiometer in minimum resistance the RESET pin (pin 4) will get voltage so the IC is activated. And then when the resistance of LDR decreases and the potentiometer is still in minimum resistance the RESET pin (pin 4) will not get voltage so the IC is not activated. Before explaining how to make the dark detector circuit I will share a little about the 555 timer IC.







Recent Comments