Pernah mengukur tinggi badan ? pakai apa ? Alat pengukur yang ada di UKS atau pengukur yang sepaket sama pengukur berat badan dipojokan samping pintu masuk ruang periksa di Rumah Sakit ?
Manusia memang perlu tahu kondisi mereka sendiri. Dengan hal tersebut, manusia bisa melakukan hal-hal yang diinginkan dengan menimbang kondisi mereka saat ini. Dalam masalah ini, Tinggi Badan manusia memang diperlukan informasinya dalam beberapa kondisi, misalnya ketika mendaftar Akademi Kepolisian atau Kemiliteran, tinggi badan dirasa penting untuk beberapa posisi, karena personil harus mampu menjangkau beberapa alat yang didesain khusus untuk beberapa posisi tersebut.
Alat pengukur tinggi badan yang digunakan di beberapa tempat, masih menggunakan alat sistem lama, yakni menggunakan sistem analog, dimana kita perlu melihat titik tertinggi dari badan kita pada alat tersebut. Alat ini memang cepat dalam mengukur tinggi badan, namun keandalannya ketika informasi tinggi badan perlu dimasukan kedalam data digital masih belum baik.
Alat yang kelompok saya buat adalah Human Height Measurement. Alat ini mengukur tinggi badan namun informasi yang tertampil berupa informasi digital. Alat ini menggunakan Arduino Uno.
Prosedur
Beberapa langkah dalam membuat alat ini adalah sebagai berikut :
- Mempersiapkan Alat dan Bahan
- Membuat Skema Kerja Alat
- Membuat Program untuk Arduino Uno
- Simulasi
- Membuat Prototype
- Alat-alat penunjang lain :
- Laptop ( memprogram Arduino Uno )
- Solder dan timah solder
- Lem Tembak
- Pinhead arduino
Skema Kerja Alat
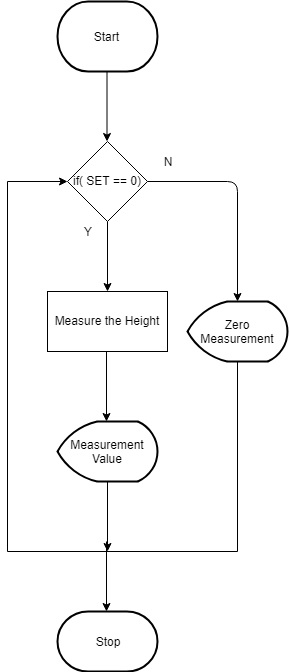
Algoritma dari alat sangat sederhana. Arduino hanya akan memberi perintah ke Sensor Ultrasonic ketika tombol SET ditekan. Saat SET ditekan, maka arduino akan memproses logika, lalu menjalankan perintah yang telah diprogram. Untuk mematikan alat tinggal melepas Kabel hubung battery.
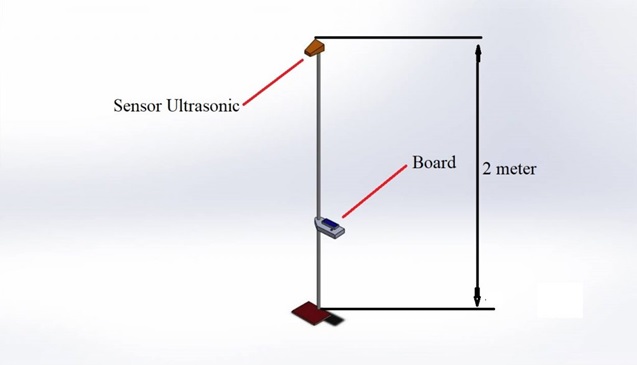
Desain awal dari alat yang kami buat adalah dengan meletakkan Sensor Ultrasonic berjarak 2 meter dari lantai/pijakan. Hal seperti ini bertujuan untuk membuat akurasi sensor ultrasonic untuk mengukur jarak lebih tinggi.
Program
C/C++
/*
VVC +5V
GND ground
TRIG digital pin 12
ECHO digital pin 11
*/
#include <LiquidCrystal.h>
#define st 6
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
const int TRIG_PIN = 8;
const int ECHO_PIN = 9;
boolean set, reset;
void setup() {
Serial.begin(9600);
pinMode(6, INPUT);
digitalWrite(6, HIGH);
digitalWrite(7, HIGH);
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
lcd.begin(16, 2);
lcd.setCursor(0, 0);
lcd.print(“Height”);
lcd.setCursor(0, 1);
lcd.print(“Measurement”);
delay(3000);
lcd.clear();
}
void loop()
{
long duration, distanceCm;
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
set = digitalRead(st);
if (set == LOW)
{
duration = pulseIn(ECHO_PIN, HIGH);
distanceCm = duration / 29.41 / 2 ;
if (distanceCm > 0)
{
Serial.print(distanceCm);
Serial.println(“CM”);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print(“Tinggi badan”);
lcd.setCursor(0, 1);
lcd.print(200-distanceCm);
lcd.print(” Cm “);
delay(5000);
lcd.clear();
}
}
else {
delay(3000);
lcd.setCursor(0, 0);
lcd.print(“Press SET”);
lcd.setCursor(0, 1);
lcd.print(“to Start”);
}
}
Program hanya memiliki dua input, yakni input dari Push button dan pin ECHO pada sensor ultrasonic. Ketika dijalankan pertama kali, program akan menampilkan string ” Height Measurement” dengan delay waktu 3 detik. Setelah itu arduino akan memeriksa kondisi pada Input button. Ketika input button “HIGH”, maka hanya akan menampilkan string ” Press SET to Start”, namun ketika input button berubah menjadi “LOW”, maka arduino akan menjalankan sensor ultrasonic untuk mengukur jarak dengan benda.
Dalam menentukan jarak menggunakan sensor ultrasonic, diperlukan pemindahan data dari kecepatan penerimaan sinyal di pin ECHO kedalam satuan jarak cm. Sensor ultrasonic bekerja dengan mengirim sinyal suara ultrasonic melalui pin TRIG, lalu ketika suara tersebut memantul dari benda menuju ke pin ECHO. Kecepatan suara ultrasonic ini adalah 340 m/s atau 0,034 cm/µs = 1/29.14 cm/µs. Karena Sinyal Ultrasonic memerlukan waktu saat mengirim dan saat menerima, maka durasi perlu dibagi 2, sehingga persamaannya menjadi = distanceCm = duration / 29.41 / 2 .
Disusun oleh:
- Evita Priherdini (17/416782/SV/14520)
- Faisal Zeqlyw Hendartriaji (17/416784/SV/14522)
- Fakhrurrozi Zainal Abidin (17/416785/SV/14523)
- Wahyu Ridha Pratama (17/416823/SV/14561)

Mohon Share Circuit Diagram
Hallo ka boleh minta gambar rangkaian nya ga