
Pemodelan system ini menggunakan rangkaian boost converter. Boost converter merupakan converter daya dari DC ke Dc yang memiliki kriteria tegangan output lebih besar dari tegangan input-nya. Yang nantinya akan dikendalikan dengan kendali full state feedback dengan metode pole placement. Untuk dapat mengendalikan boost converter dengan kendali full state feedback terlebih dahulu mencari state space-nya. Karena pengerjaan dalam metode full state feedback harus berdasarkan pada metode desain state space. State space merupakan suatu pemodelan matematis dalam bentuk matriks yang mewakili sebuah transfer function dari system tersebut. Secara umum representasi state space ditunjukkan pada persamaan sebagai berikut:

Untuk t ≥ t0 dan kondisi awal x(t0) diamana,
| x= state space | A = matriks sistem |
| x_dot= turunan dari state space terhadap waktu | B = matriks input |
| y= output vector | C = matriks output |
| u= input atau control vector | D = matriks feed forward |
Dalam pemodelan state space ini menggunakan representasi system dalam bentuk Controller Canonical Form (CCF). Representasi dalam bentuk CCF ini didapatkan dari membalik urutan variable state-nya yang berguna untuk proses perancangan pengendalian state space. Setelah didapatkan state space dalam bentuk CCF maka barulah memodelkannya dalam kendali full state feedback. Dalam mengendalikan suatu system dengan kendali full state feedback harus memenuhi syarat, bahwa system harus controllable. Untuk mengetahui system controllable atau tidak, dengan cara menguji system dengan controllability. Setelah dinyatakan bahwa system controllable maka system dapat dikendalikan dengan full state feedback.
Pemodelan system dari Representasi State Space untuk Analistis Boost Converter ini terdiri dari beberapa diagram system, seperti block diagram system control otomatis, block generalized diagram dari system dinamis, dan skema boost converter, yang akan ditunjukkan pada gambar dibawah ini:

Gambar 1. Bolk Diagram Sistem Kontrol Otomatis
Gambar 1 menunjukan sebuah gambaran state space dengan control otomatis. Gambar 1 memiliki input yang terdiri dari u1(t) dan u2(t), dan memiliki variable output y1(t) dan y2(t).
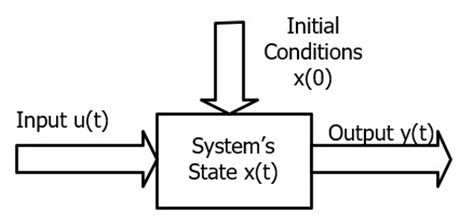
Gambar 2. Blok Diagram Generalized dari Sitem Dinamis
Gambar 2 merupakan gambar diagram blok umum dari system dinamis. Gambar 2 memiliki input u(t), output y(t), inisial conditions x(0), dan system s state x(t).

Gambar 3. Schematic Boost Converter
Gambar 3 merupakan gambar schematic boost converter yang nantinya akan dibuat dalam model state space pada pemodelan matematis.

Gambar 4. Plant dengan kendali full state feedback
Gambar 4 merupakan gambar palnt dengan kendali full state feedback yang akan menjadi acuan dalam simulasi Simulink. Selanjutnya untuk pemodelan system, pemodelan matematis, dan simulasi secara lengkap dapat dilihat pada video berikut.
Disusun oleh Awanda Doda Listyaning (19/450988/SV/17265)