
Kepada Mahasiswa Departemen Teknik Elektro dan Informatika (DTEDI) Sekolah Vokasi Universitas Gadjah Mada, Laboratorium Instrumentasi dan Kendali DTEDI SV UGM memberikan tawaran penelitian Skripsi kepada tiga hingga lima mahasiswa AP D4 TRIK 2019 DTEDI SV UGM untuk melaksanakan penelitian Skripsinya di Laboratorium dengan tema penelitian robotika dengan kendali nya sebagai berikut (memilih salah satu saja sesuai dengan yang diminati):
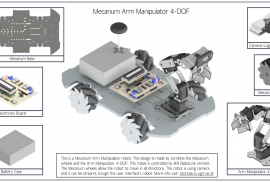
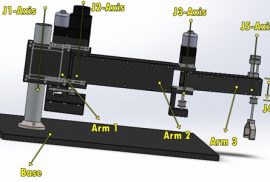
1. Arm robot control system with image processing (ada dua jenis hardware ready)








Recent Comments